Koptéru máme postavenou. Všechny následující kroky dělejte s odmontovanými vrtulemi!
Nastavení rádia a bindování
Pozn: „bindování“ znamená propojení vysílače s přijímačem tak, aby mezi nimi mohla probíhat potřebná komunikace.
Nastavení modelu v rádiu (RC vysílači) budeme ukazovat na systému OpenTx. Pokud vlastníte rádio běžící na jiném systému, tak vám nezbyde nic jiného než pátrat na internetu po návodu zrovna k vašemu rádiu. Vzhledem k tomu, že veškeré nastavení řídící jednotky i regulátorů se provádí přes PC, tak i rádio nastavíme pomocí aplikace v počítači.
OpenTX Companion 2.1
Začněme tedy rádiem. Pokud to s koptérami myslíte vážně a ještě nemáte RC soupravu, tak rozhodně doporučujeme začít na FrSky systému, třeba s vysílačem Taranis Q X7. Jedná se o plnohodnotné rádio, které se velmi dobře drží v ruce a dosahuje stejných kvalit jako FrSky Taranis Plus X9D+ a přitom stojí o polovinu méně.
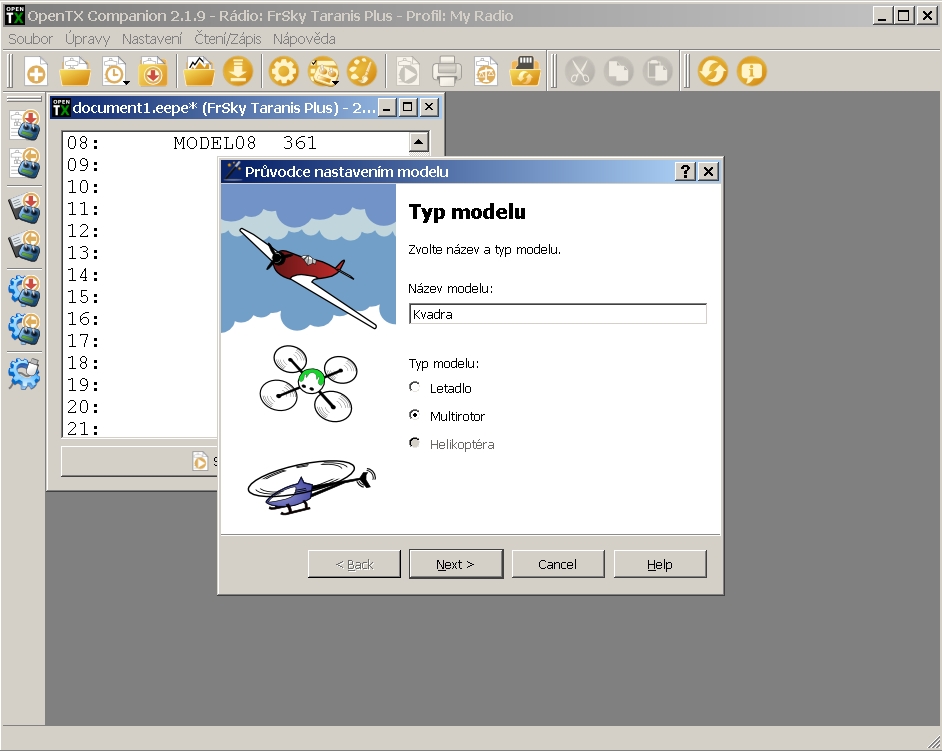
Nejprve si stáhněte software OpenTX Companion z http://www.open-tx.org/downloads. Po instalaci a spuštění můžete program přepnout do českého jazyka v „nastavení“. Nyní klikněte na tlačítko stránky s plusem. Tímto se vytvoří nový soubor s nastavením rádia. Zde můžete nastavit až 60 uložených modelů. Pravým tlačítkem myši klikněte na první pozici a vyberte „Průvodce nastavením modelu.“ Model si pojmenujte, vyberte „Multirotor“ a klikněte na „Next.“
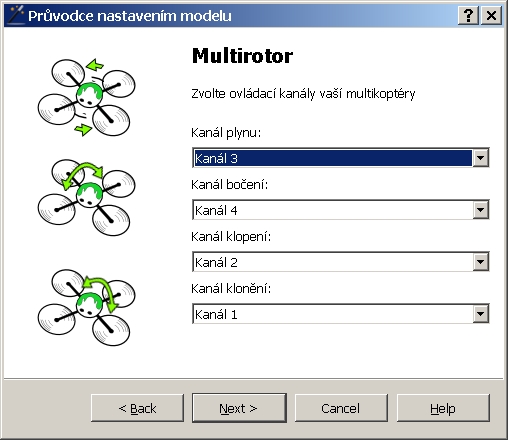
Nyní provedeme nastavení základních 4 kanálů pro ovládání modelu. Jelikož FC automaticky pracuje s posloupností kanálů AETR (Aileron, Elevator, Throttle, Rudder), tak podle toho přenastavíme kanály i zde. Plyn – kanál 3, bočení (směrovka) – kanál 4, klopení – kanál 2 a klonění kanál 1. Klikněte na „Next.“ V další dialogovém okně zaškrtněte „Stopky na plynu“, „Next“ a na posledním dialogovém okně zaškrtněte „OK, rozuměl jsem“ a dokončete tlačítkem „Finish.“
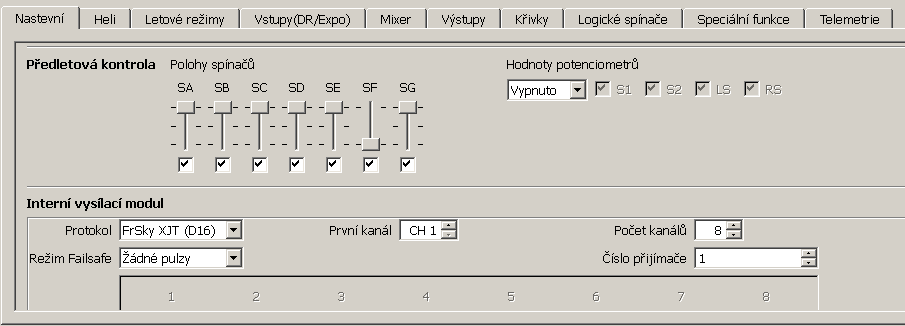
Ještě to není všechno. Nyní na vytvořený model dvakrát klikněte, čímž se otevře okno „Editace modelu.“ U stopek 1 nastavte hodnotu času na „00:05:00,“ Odečítat nastavte na „Hlas“ a zaškrtněte „Oznamovat minuty.“ Tímto máme nastaveno to, že pokud hodnota na Plynu bude vyšší než jedna, tak se spustí odpočet 5 minut. Každou minutu vám rádio zahlásí. Pět minut je většinou maximální doba, jakou bychom měli na jeden akumulátor létat. Může to být víc, ale často i méně. Hodnotu si když tak později přenastavte. Pokud budete chtít létat hned další akupack, tak je třeba stopky vynulovat. Přejděte tedy do „Speciální funkce“ a u SF1 vyberte Spínač SH se šipkou dolů, Akci nastavte na „reset“ a automaticky vám naskočí Hodnota na „Stopky 1.“ Teď už jen zaškrtněte „Zap.“ Páčkou vpravo vepředu budete teď stopky resetovat dle libosti. Vraťme se zpět na záložku Nastavení a u „Předletová kontrola“ posuňte posuvník u přepínače SF dolů a v části „Interní vysílací modul“ nastavte režim Failsafe na „Žádné pulsy.“ Prvním krokem jsme nastavili výchozí pozici páčky vlevo vepředu tak, že musí být nahoře. Je lepší startovat motory koptéry spuštěním páčky dolů, a vypínat je posunutím páčky nahoru.
Přepněte se na záložku „Vstupy (DR/Expo).“ Zde jsou již z průvodce nastaveny první čtyři kanály pro základní ovládání. Nyní potřebujeme nastavit další tři. Pátý kanál bude sloužit pro zapnutí a vypnutí motorů. Dvakrát klikněte na „Vstup05“ a do Názvu zadejte „Arm,“ jako Arming. V poli Zdroj vyberte dvoupolohový přepínač „SF“ a klikněte na OK. Kanál šest vytvoříme pro přepínání módů. Pojmenujte jej „Mod“ a jako zdroj vyberte přepínač „SE.“ Kanál sedm bude sloužit pro zapnutí a vypnutí bzučáku. Hodí se to, pokud koptéru nemůžete najít. Zapnete pípák a jdete po zvuku. Sedmičku pojmenujte „Beep“ a zdrojem může být například „SC.“
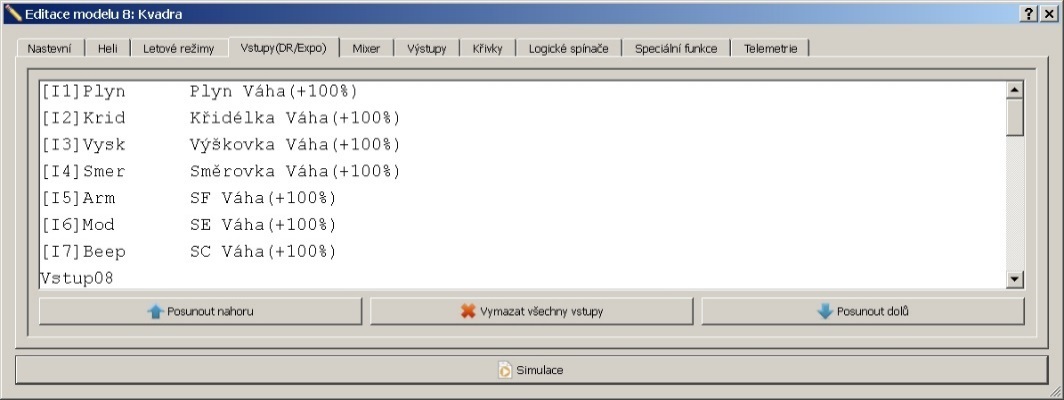
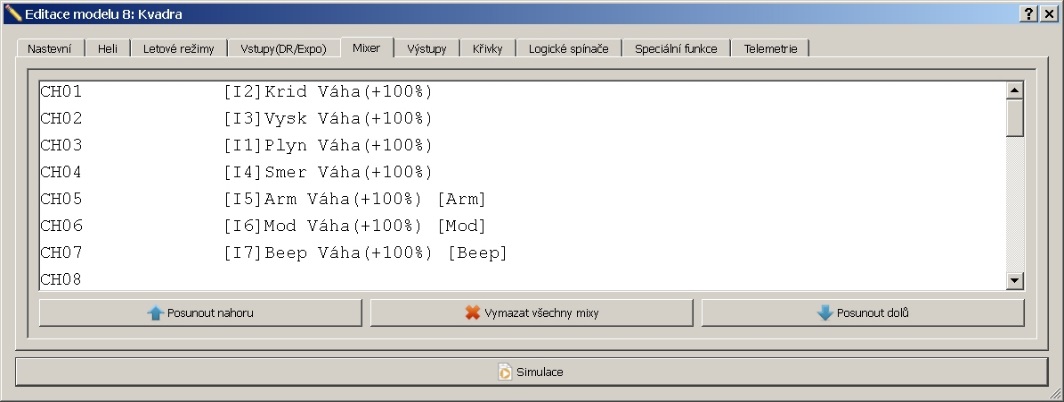
Vstupy máme nastaveny. Ale to pořád neznamená, že přijímač bude dostávat povely. Ke každému vstupu musí být náležitý Mix. Po přepnutí na záložku „Mixer“ zjistíte, že základní 4 jsou opět nastaveny. Nyní znovu vytvoříme ty tři pro Arm, Mod a Beep. Dvakrát klikněte na „CH05“ a postupujte stejně jako u Vstupů. Název „Arm“ a ve zdroji vyberte již přednastavený vstup „[I5]Arm.“ To samé vytvořte pro zbývající dva. Mělo by to vypadat jako na obrázku.
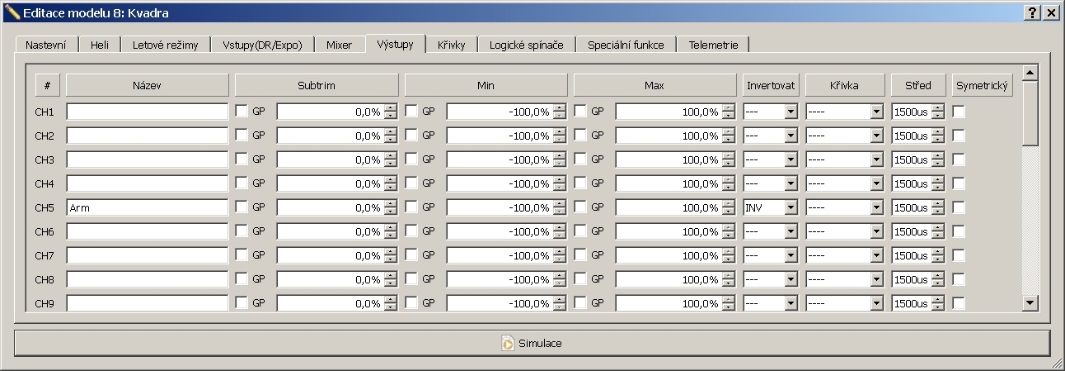
Poslední věcí je, že pro armovací přepínač musíme invertovat hodnoty. Rádio nám sice kontroluje výchozí pozici přepínače, ale my ještě potřebujeme nastavit to, že ve vrchní výchozí pozici bude hodnota nula. Přepněte se tedy do záložky „Výstupy“ a u „CH5“ zadejte název „Arm“ a ve sloupci „Invertovat“ vyberte hodnotu „INV.“ A je to. Model máme nastaven. Nyní je potřeba jej nahrát do rádia.
Veměte vysílač a současně zmáčkněte oba horizontální trimy směrem k sobě (k prostředku) a za jejich držení zapněte rádio. Nyní připojte USB kabel do rádia a PC. Chvilku počkejte, než se nainstalují ovladače a pak v OpenTX Companionu stiskněte tlačítko „Zapsat modely a nastavení do rádia.“ Můžete, ale nemusíte zaškrtnout „Zkontrolovat kompatibilitu firmware“ a stiskněte „Zapsat do rádia.“
Teď už jen zbývá nabindovat přijímač. Postup je jednoduchý, ale pravděpodobně si sežeňte někoho k ruce. Na rádiu stiskněte tlačítko „Menu,“ vyberte si model, ke kterému chcete nabindovat přijímač a stiskněte tlačítko „Page.“ Nyní sjeďte na položku „Bind“ a potvrďte ji „Enter.“ Rádio by mělo začít pípat. Tomuto stavu se říká „Bind mod.“ Na řadě je ta komplikovanější část. Na přijímači si najděte tlačítko pro bindování dle manuálu. Toto musíte stisknou a držet a současně připojit akumulátor. To je lepší dělat ve dvou lidech, ale šikovní to zvládnou sami. Konektor akumulátoru zase vypněte a na rádiu stiskněte znovu Enter pro zrušení Bind modu. Máme nabindováno.
Betaflight configurator
Zdálo se vám toho hodně? Pak si uvařte další silnou kávu a jdeme pokračovat nastavením řídící jednotky. Pro tohle budete potřebovat konfigurátor, program který vám umožní firmware do řídící jednotky nahrát a dále ho konfigurovat. Naše řídící jednotka bude používat vyzkoušený firmware Betaflight, pro jeho ovládání budete potřebovat Betaflight Configurator (dále o něm budeme psát jako o „BFC“). Stáhnete ho zde: https://github.com/betaflight/betaflight-configurator/releases. Zvolíte si instlační program podle systému svého počítače, stáhnete a spustíte. Konfigurátor se vám nainstaluje.
Po jeho spuštění (pokud máte PC s Windows) se na úvodní stránce objeví odkazy na potřebné drivery: „CP210x Drivers“ a „STM USB VCP Drivers.“ Oba postupně stáhněte a nainstalujte.
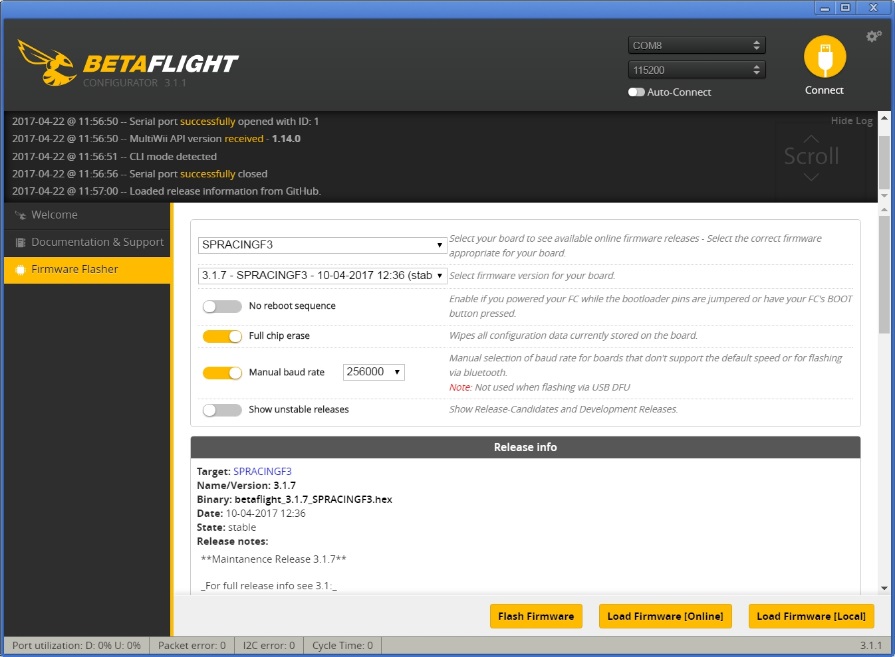
Nyní vezměte koptéru a z boku do ní připojte mikro USB kabel a ten pak druhým koncem do PC. BFC by měl automaticky (s indikací vpravo nahoře) rozpoznat správný COM port. „Connect“ zatím nedávejte a ani nezaškrtávejte „Auto-Connect.“ Místo toho vlevo v menu klikněte na „Firmware Flasher.“ Uprostřed nahoře by Vám BFC měl sám rozpoznat FC jako „SPRACINGF3“ a pokud ne, tak jej vyberte. Nyní Vám dá na výběr verzi firmwaru, vyberte tedy tu nejaktuálnější. Zapněte „Full chip erase.“ Toto vymaže veškerá nastavení v FC. A dále nastavte „Manual baud rate“ hodnotou „256000.“ Dole klikněte na „Load firmware online.“ Po stažení FW se Vám rozsvítí tlačítko „Flash Firmware“ a na něj klikněte. Může se vám stát, že dojde k chybě při nahrávání FW. Pak celý postup zopakujte, dokud se to nepovede. Pokud by Vám to stále nešlo, tak se řiďte postupem „Recovery / Lost communication.“
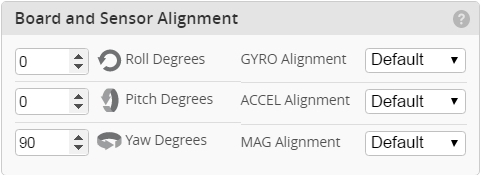
Pokud flashování proběhlo v pořádku, tak můžete kliknout nahoře na „Connect.“ Na úvodní obrazovce uvidíte 3D model kvadrokoptéry a když nyní zahýbete tou svou skutečnou, bude se hýbat i model. Asi si ale všimnete, že se nehýbe přesně tak, jak má. To je dáno tím, že FC je v modelu pootočena. V našem případě o 90o. To je první věc, kterou musíme napravit. Kdybyste takto koptéru zapnuli s vrtulemi, tak vám vyskočí a udělá pár kotrmelců. Proto ihned přes menu vlevo klikněte na záložku „Configuration“ a najděte si část nazvanou „Board and Sensor Alignment.“ V levé části jsou na třech řádcích právě možnosti pro natavení otočení FC ve třech osách. Nastavte u „Yaw Degrees“ hodnotu 90o. Tímto jsme FC oznámili, že deska je fyzicky otočena o 90o doleva a my to takhle vykompenzovali. Vpravo dole klikněte na „Save and Reboot.“ Nyní když v menu kliknete na „Setup,“ tak si můžete všimnout, že se model koptéry hýbe přesně tak jak má.
V dalším kroku se přesuňte do menu „Ports“ a jestli si vzpomenete, tak přijímač jsme připájeli pomocí tří kablíků k UART3. Tak teď FC musíme říct, že UART3 bude sloužit pro sériový přenos dat z S.BUS přijímače. Stačí ve třetím řádku aktivovat „Serial RX.“ Nic víc. Vpravo dole klikněte na „Save and Reboot.“
![]()
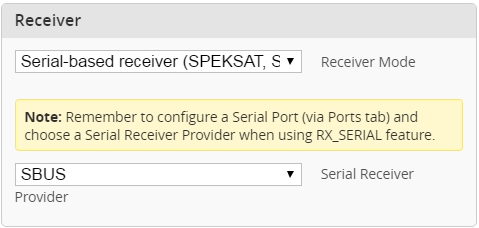
Nyní se přepněte znovu do záložky „Configuration“ a zde nastavíme dalších pár hodnot. Tou první je oblast „Receiver,“ kde vybereme „Receiver Mode,“ v našem případě se jedná o „Serial-based Receiver“ a dole pod ním je hodnota „Serial Receiver Provider,“ kterou nastavíme pro přijímač FrSky „SBUS.“
Dole na záložce „Configuration“ si můžete ještě aktivovat „LED_STRIP,“ kdybyste měli nainstalovány RGB diody. FC totiž umožňuje nastavovat barvy, nebo různé stavové funkce, jimiž by vás LED pásek informoval o stavu koptéry. Prozatím můžete vypnou funkci „BLACKBOX,“ která se používá na vyhodnocování letu. Osobně si ji zapínám jen v případě, když něco s FC není v pořádku. A časem využijete zapnutý „AIRMODE,“ který je vhodný pro akrobatické létání. Do začátku však budete létat se zapnutou stabilizací. Klikněte na „Save and Reboot.“
Zapněte si rádio a až nastartuje, tak ke koptéře připojte akumulátor. Vrtule pořád nejsou nasazeny! Koptéra se zinicializuje, ale pokud jste se řídili návodem, tak by se motory roztočit stejně neměly. V prvé řadě se přepněte do záložky „Receiver.“ Zkuste zahýbat páčkami na rádiu. Přesně podle povelů by se měly hýbat barevné posuvníky. Pokud ne, tak jste někde v konfiguraci modelu v rádiu udělali chybu, nebo jste špatně připájeli přijímač, není nabindovaný nebo jste špatně nastavili záložku „Ports,“ či v záložce „Configuration“ oblast „Receiver.“ Poslední možností je nefunkční přijímač nebo FC. Vyzkoušejte taky reakci kanálů 5 – 7, které slouží pro zapnutí motorů (arming), přepínání módů a aktivaci pípáku.
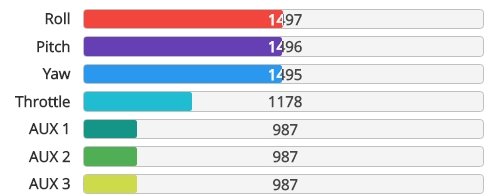
Na vysílači nastavíme středy kanálů 1 až 4 tak, aby BFC udával hodnotu 1500 us (mikrosekund). U plynu to není tak kritické, u ostatních kanálů ano. Krajní hodnoty (při plných výchylkách) kanálů 1 až 4 by měly být 1000 a 2000 us, takhle bude FC přesně vědět kdy máte páky v neutrálu a kdy na plné výchylce – a co tedy od koptéry přesně chcete.
Přepněte se do záložky „Modes“ a nastavíme letové módy a jiné funkce. První je „ARM.“ Touto funkcí se zapínají motory. Roztočí se na přednastavené minimální otáčky. Klikněte na „Add Range“ a vyberte jako zdroj „AUX1,“ což je pátý kanál. Rozsah nastavte na pravé dvě třetiny, které označují že je funkce aktivní. Zkuste si na rádiu přepnout přepínač, který jste si určili na arming, dle našeho nastavení je to SF. Žlutý ukazatel hodnot vám bude skákat zleva doprava. Nyní nastavte „AIR MODE“ na „AUX 2“ a rozsah nastavte na pravou třetinu, tzn. mezi 1600 a 2100. Tohle aktivuje akrobatický mód, ale až na nejvyšší pozici třípolohové páčky. „BEEPER“ nastavte na „AUX 3“ a rozsah mezi 1300 a 2100. Páčkou aktivujete pípák, abyste mohli koptéru snáze najít. A u „ANGLE“ přiřaďte vstup opět na „AUX 2,“ ale tentokrát s rozsahem 900 až 1600. Tímto si zajistíme, že na stejném třípolohovém přepínači, kterým aktivujeme „AIR MODE,“ budeme mít na prvních dvou polohách aktivovanou stabilizaci. Vpravo dole klikněte na tlačítko „Save.“ Nyní si můžete poprvé zkusit roztočit motory a aktivovat pípák.

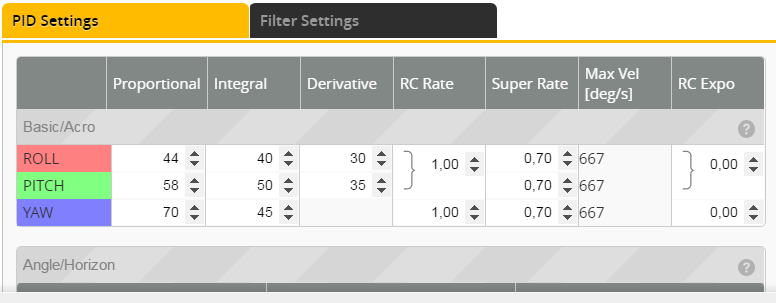
Ještě dvě věci bychom měli zmínit. Tou první jsou hodnoty „RC Rate“ v záložce „PID Tunning“ a ve stejné složce PID hodnoty. „RC Rate“ jsou vlastně násobky hodnot povelů, které dáváte vysílačkou skrz Rx do FC. Hodnota 1.0 znamená 100%, takže pokud se vám ovládání koptéry zdá příliš ostré, tak hodnotu snižte. Parametry PID jsou trochu složitější na vysvětlení. Jedná se o hodnoty Proportional, Integral a Derivative tzv. „PID regulátoru“, matematického algoritmu, který se snaží koptéru stabilizovat, případně jí donutit následovat vaše řídící povely. Jeho popis je nad rámec tohoto textu. Každopádně výhodou firmware Betaflight je to, že nám koptéra vždy dobře letěla s výchozími hodnotami.
Blheli suite
Ještě zbývá nastavit regulátory. Stáhněte si BlheliSuite ze stránek https://blhelisuite.wordpress.com/ a někam si ZIP soubor rozbalte.
Spusťte si BLHeliSuite. Teď zkontrolujte, že v menu „Select ATMEL / SILABS Interface“ máte vybráno „SILABS BLHeli Bootloader (Cleanflight).“ Tímto umožníme konfiguraci ESC skrze řídící jednotku a fw Cleanflight a Betaflight. Nyní připojte ke koptéře akumulátor. Pokud nechcete poslouchat pípák, tak jej přelepte páskou, nebo si zapněte předtím rádio. Koptéru připojte přes USB do PC. Dole v okně je políčko „Port,“ zde musíte vybrat správný COM, u kterého by mělo být napsáno „Silicon Labs CP210x USB to UART Bridge.“ Poté klikněte v BLHeliSuite (dále jen BLH) na „Connect.“ Nyní vlevo dole klikněte na „Read Setup,“ čímž dojde k načtení informací z ESC.
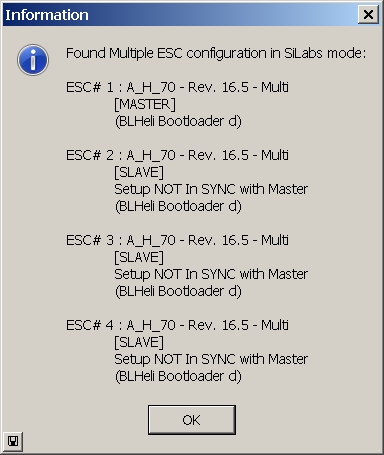
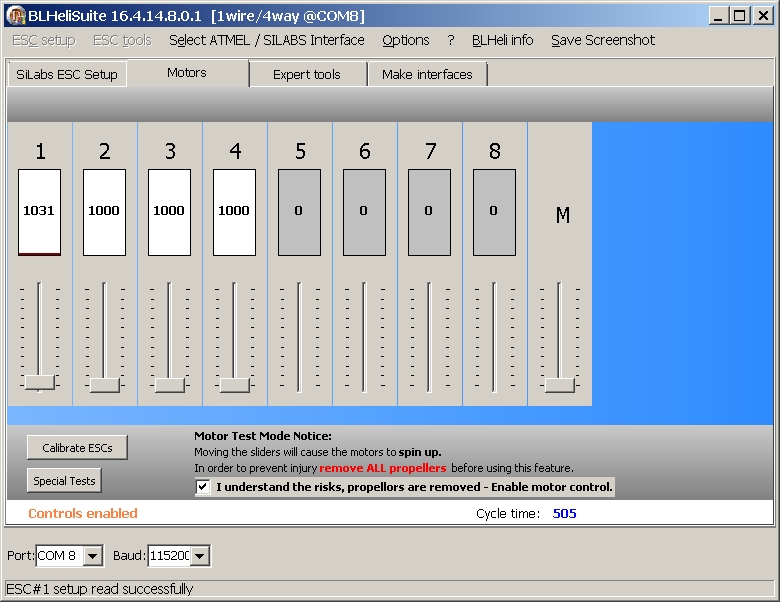
Jak můžete vidět, tak první ESC je správně „MASTER“ a zbylé „SLAVE.“ Klikněte na „OK“ a přejděte se na záložku „Motors.“ V této chvíli dojde k inicializaci koptéry, tak je důležité stále ještě nemít nasazené vrtule! Zaškrtněte poličko „I understand the risk …“ čímž umožníte nastartování motorů. Plnou kontrolu přebírá BLH. V prostřední části okna máte celkem 8 posuvníků pro jednotlivé motory a jeden pro aktivaci všech motorů najednou. Nyní jeden po druhém posuňte nahoru na takovou hodnotu, aby se motor pomalu roztočil. Je nutné zkontrolovat směr otáčení motorů. Dá se to udělat tak, že na pomalu roztočený motor přiložíme prst a zjistíme podle odporu, na jakou stranu se otáčí. Směry otáčení si zapište nebo zapamatujte. Jednička se musí točit doprava, dvojka doleva, trojka doleva a čtyřka doprava. Pravděpodobně se vám točí některé motory v nesprávném smyslu.
Opět se tedy přepněte na záložku „SILabs ESC Setup“ a klikněte na „Connect“ a pak na „Read Setup.“ Měly by se vám dole načíst 4 ESC. Pravým tlačítkem klikněte na motor, u kterého chcete změnit směr otáčení. Nahoře posuvníkem vyberte u „Motor Diredtion“ hodnotu „Reversed“ a pak klikněte na „Write Setup.“ Mělo by se Vám objevit „Write OK.“ To samé proveďte u ostatních motorů, u nichž je nutnost směr otáčení obrátit.
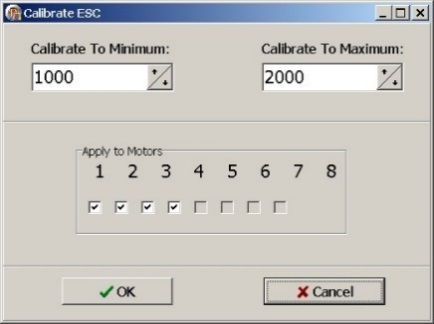
Pokud máte, tak se přepněte zpět na záložku „Motors“ zaškrtněte „I understand…“ a klikněte na „Calibrate ESCs.“ (Pokud používáte digitální protokol DShot, tak tento krok můžet přeskočit, kalibrace není potřeba). Objeví se nové dialogové okno, kde se nastavuje min a max hodnota plynu a výběr ESC. Klikněte na OK a řiďte se pokyny. Odpojit akumulátor, kliknout na OK, připojit akumulátor, a nakonec kliknout na OK. Tímto jste všem ESC nastavili stejnou hodnotu plynu. Nestane se tedy, že jeden motor bude mít vyšší otáčky než ostatní – pokud to tak nemá být schválně.
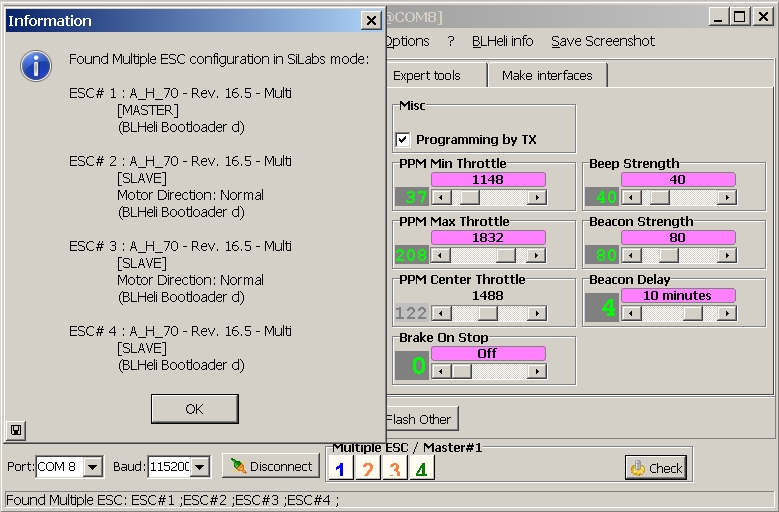
Přepněte se opět na záložku „SILabs ESC Setup,“ klikněte na „Connect“ a „Read Setup“ a pokud jsou načteny všechny ESC, tak následně na „Write Setup.“ Vše by mělo být OK a čísla ESC dole by měla změnit barvu. Modrá je „Master,“ oranžová a zelená je „Slave.“ Když kliknete dole vpravo na „Check,“ tak se vám objeví dialogové okno se stavem všech ESC.
Můžete kliknout na Disconnect a koptéru odpojit. Doporučuji si ještě jednou prověřit směry otáčení motorů, než půjde prvně s modelem létat. A je to tady, čeká vás první let.