V této kapitole si ukážeme, jak postavit koptéru na rámu Rotorama Samurai V2. V této konfiguraci se jedná o jednu z nejrychlejších 6S koptér.
Pro stavbu použijeme komponenty:
- Rám: Rotorama Samurai V2
- Motory: HGLRC FD2207
- ESC+FC: HGLRC FD445
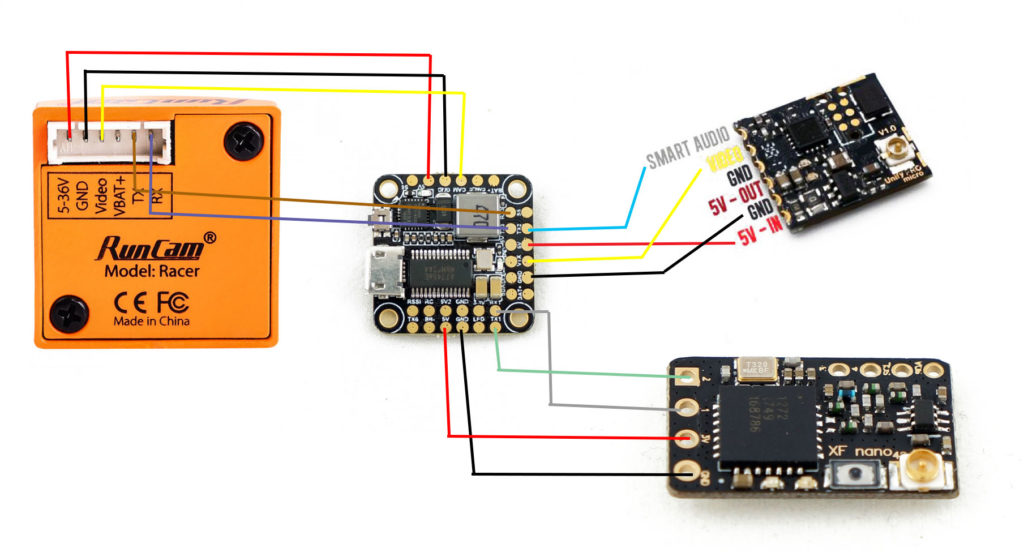
- Kamera: Runcam Racer 2
- Video vysílač: TBS Unify Pro Nano
- Anténa: Foxeer Lollipop
Při stavbě koptéry na rámu Samurai V2 nejprve složíme rám. Aby se nám rám nerozpadal, dočasně našroubujeme na šrouby matky. Dále namontujeme motory. Při přidělávání motorů je třeba dát si pozor na délku použitých šroubů. Ne vždy jsou šrouby, které jsou v balení s motorem, vhodné. Pokud použijeme moc krátký šroub, snadno strhneme závit na motoru. Při použití dlouhého šroubu se můžeme šroubem dostat až do vinutí motoru a motor zničit. Obvykle se používají šrouby o 2-3mm delší, než je tloušťka ramena. Protože Samurai V2 má ramena z 5mm uhlíku, použijeme 8mm dlouhé šrouby. Kabely od motorů přichytíme k ramenům pomocí textilní izolační pásky. Lépe se nám pak bude měřit potřebná délka kabelů a stavba bude vypadat hezky.

V dalším kroku na koptéru namontujeme regulátor. Použijeme jeden dlouhý šroub skrz celý stack. Pod regulátor dáme distanční sloupek, aby pod ním byl dostatek prostoru na prostrčení lipo pásku.

Regulátor je poměrně velký a proto je třeba si důkladně promyslet, jak bude orientovaný a kudy povedou kabely. Je nutné brát v úvahu to, že na rám se posadí bouda. Kabely od motoru by boudě neměli překážet a ideálně by se neměli dotýkat hran. Bužírka se o hranu boudy může snadno proříznout a fáze motoru se pak spojí s vodivým rámem. Po promyšlení, kudy potáhneme kabely, je zkrátíme a připájíme. Jak konce kabelů, tak pady na regulátoru je třeba důkladně pocínovat, než je začneme pájet dohromady.

V dalším kroku přidáme do stacku řidicí jednotku. Tu s regulátorem spojíme pomocí přiloženého kablíku, dáme ji do stacku tak, aby USB směřovalo do boku a upevníme pomocí matek.

Dále na regulátor připájíme silový kabel s XT60. Při pájení silového kabelu je třeba si pořádně pocínovat konec kabelu a pájecí plošky. Pájecí pady pohltí hodně tepla, je tedy třeba mít páječku na místě dostatečně dlouho, než se pad prohřeje a cín se na něj rozlije. Silový kabel pak uchytíme k rameni pomocí textilní pásky nebo stahovacího pásku. Při nárazu, kdy baterie odletí z koptéry, energii letící baterie pohltí stahovací pásek a výrazně se zmenší šance, že se utrhnou pájecí plošky z regulátoru.

V dalším kroku si připravíme video vysílač a boudu. Na video vysílač připájíme kablíky. Anténu zatím nepřipojujeme. Použijeme ploutev vytisknutou na 3D tiskárně. Model je dostupný na thingiverse. Do ploutve nejprve vložíme anténu a až poté, ji připojíme k video vysílači. Celý video vysílač zasmrštíme do bužírky, abychom zabránili nechtěnému odpojení antény. Video vysílač pak pomocí oboustranné lepicí pásky přilepíme k ploutvi. Nakonec namontujeme do bočnic i kameru. Pro ovládání kamery přes řidicí jednotku je třeba ji nejprve do tohoto režimu přepnout. To uděláme tak, že zkratujeme RX a TX pin na kameře a kameru zapneme. Je vhodné toto udělat ještě před tím, než boudu i s kamerou namontujete do koptéry a už se ke kablíkům nedostanete.
Když máme boudu postavenou, přiložíme ji ke zbytku koptéry a naměříme se požadovanou délku kabelů. Protože video vysílač není na konektor, můžeme nechat kabel o trošku delší, aby se nám s rozloženou koptérou lépe pracovalo. Kabely od kamery mohou být kratší, protože konektor můžeme kdykoli odpojit.  K řidicí jednotce připájíme kabely od kamery, video vysílače a přijímače. Po připájení kablíků namontujeme přijímač. Nalepíme ho na řidicí jednotku pomocí oboustranné lepicí pásky.
K řidicí jednotce připájíme kabely od kamery, video vysílače a přijímače. Po připájení kablíků namontujeme přijímač. Nalepíme ho na řidicí jednotku pomocí oboustranné lepicí pásky.
Když máme všechny kablíky napájené a přijímač nalepený, sundáme z ramen matky a složíme dohromady tělo koptéry a boudu. Po namontování boudy zapojíme pinzetou konektor kamery. Na jedno z ramen dáme dva stahovací pásky, vedle kterých potáhneme anténu od crossfire. Anténu spolu se stahovacím páskem zasmrštíme do bužírky.

Nyní stačí koptéru nastavit a je připravena k letu.
