Nejpoužívanější firmware pro řidicí jednotky na závodních FPV koptérách je Betaflight. Pro nastavení řidicí jednotky s betaflight firmwarem a update firmware se používá Betaflight Configurator. V této kapitole si projdeme, jak nastavit řidicí jednotku s Betaflightem a k čemu jednotlivé funkce jsou. Konkrétně půjde o desku iFlight SucceX-E F4 V2.1. Konkrétní nastavení často záleží na tom, jak je ostatní elektronika k řídicí jednotce zapojena. Proto se budeme odkazovat na schéma zapojení desky.
Nejdříve je třeba si stáhnout a nainstalovat nejnovější verzi Betaflight Configuratoru. V této kapitole budeme pracovat s verzí 10.7.0. Po spuštění konfigurátoru se vám zobrazí úvodní obrazovka.
Po levé straně jsou záložky konfigurátoru. Záložky Changelog a Privacy Policy přeskočíme. V záložce Documentation & Support jsou odkazy na další informace o betaflightu a řídicích jednotkách. Po kliknutí na záložku Firmware Flasher se vám otevře rozhraní pro nahrání firmware betaflight do řidicí jednotky. V pravém horním rohu volíte číslo sériové linky (COM), ke které je připojena řidicí jednotka. Pod COM portem je rychlost sériové linky (baudrate), ten necháváte nastavený na 115200. Tlačítkem Connect se připojíte do řidicí jednotky a můžete začít s nastavováním. Tlačítkem Update Firmware se dostanete do záložky Firmware Flasher pro nahrávání nového firmware.
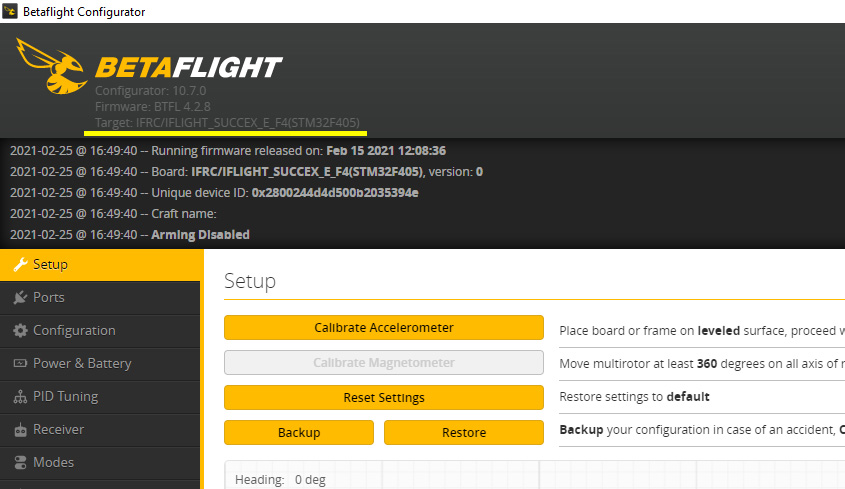
Při vybalení nové řidicí jednotky doporučujeme nahrát do ní nejnovější verzi betaflightu. Než do desky začnete nahrávat firmware, je třeba zjistit, firmware pro jakou desku patří do té vaší. To naleznete buď na stránkách výrobce nebo se podíváte, jaký firmware je momentálně v desce nahrán. Připojte se k řidicí jednotce pomocí tlačítka Connect a v levém horním rohu je vypsaný název firmware a jeho verze spolu s typem desky (Target).
Nyní můžete kliknout na tlačítko Update Firmware a pustit se do nahrání nového firmware. Aby se do desky nahrál úspěšně firmware, je třeba mít desku v boot režimu – místo COM portu se objeví DFU. Pokud je vše správně, Betaflight configurátor by měl desku přepnout do DFU automaticky sám a není to třeba dělat manuálně. Pokud se tak nestane, může být problém s ovladači. Výborný program, který sám nainstaluje potřebné ovladače je ImpulseRC Driver Fixer. Při prvním spuštění stáhne potřebné ovladače. Pokud jsou ovladače nainstalované, přepne desku do boot režimu. Během spouštění programu je třeba mít desku připojenou k PC. Deska lze také uvést do boot režimu podržením tlačítka na desce, během připojování USB kabelu, ale způsoby se mohou na různých deskách lišit.
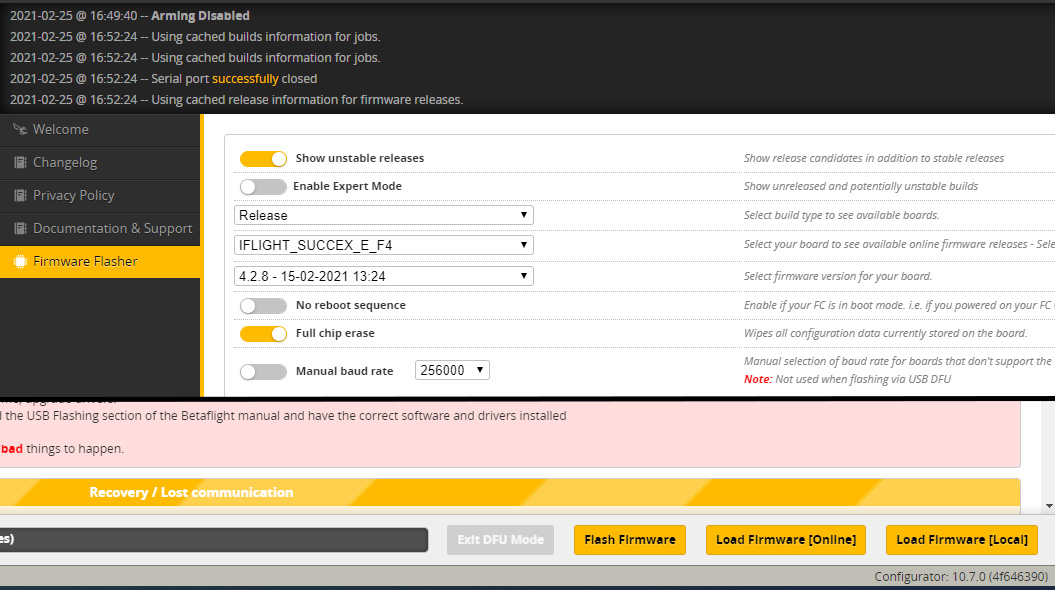
Pro nahrání nového firmwaru je třeba si vybrat správný target – typ desky (v našem případě IFLIGHT_SUCCEX_E_F4) a verzi Betaflightu (v našem případě 4.2.8). V pravém dolním rohu klikneme na Load Firmware [Online], čímž se se firmware stáhne a kliknutím na Flash Firmware ho nahrajeme do desky. Pokud máte vybranou možnost Full chip erase z desky se smaže aktuální nastavení a firmware se nahraje s výchozím nastavením (doporučujeme). Doporučujeme nahrávat vždy nejnovější stabilní verzi (zaškrtnutím Show unstable releases se zobrazí i nové testovací verze firmware). Firmware lze také stáhnout ze stránek Betaflightu a vybrat ho manuálně pomocí tlačítka Load Firmware [Local].
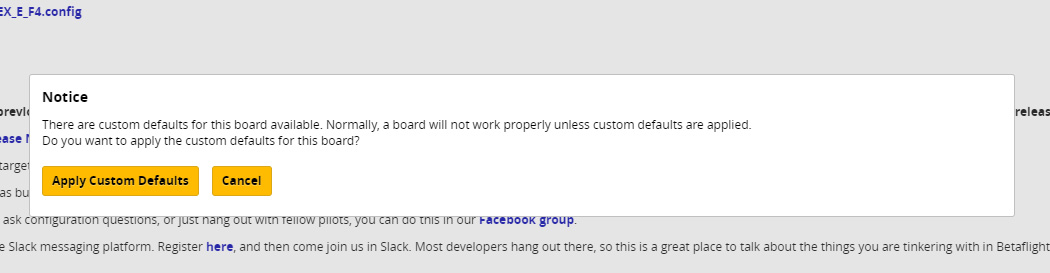
Pokud se firmware podařilo úspěšně nahrát, můžeme se k řidicí jednotce připojit a pustit se do nastavování. Veškeré nastavování koptéry dělejte bez připojené baterie nebo bez vrtulí. Nikdy nemějte koptéru připojenou k počítači s připojenou baterií, když máte nasazené vrtule. Po prvním připojení ze zobrazí oznámení jako na obrázku. Zvolte možnost Apply Custom Defaults.
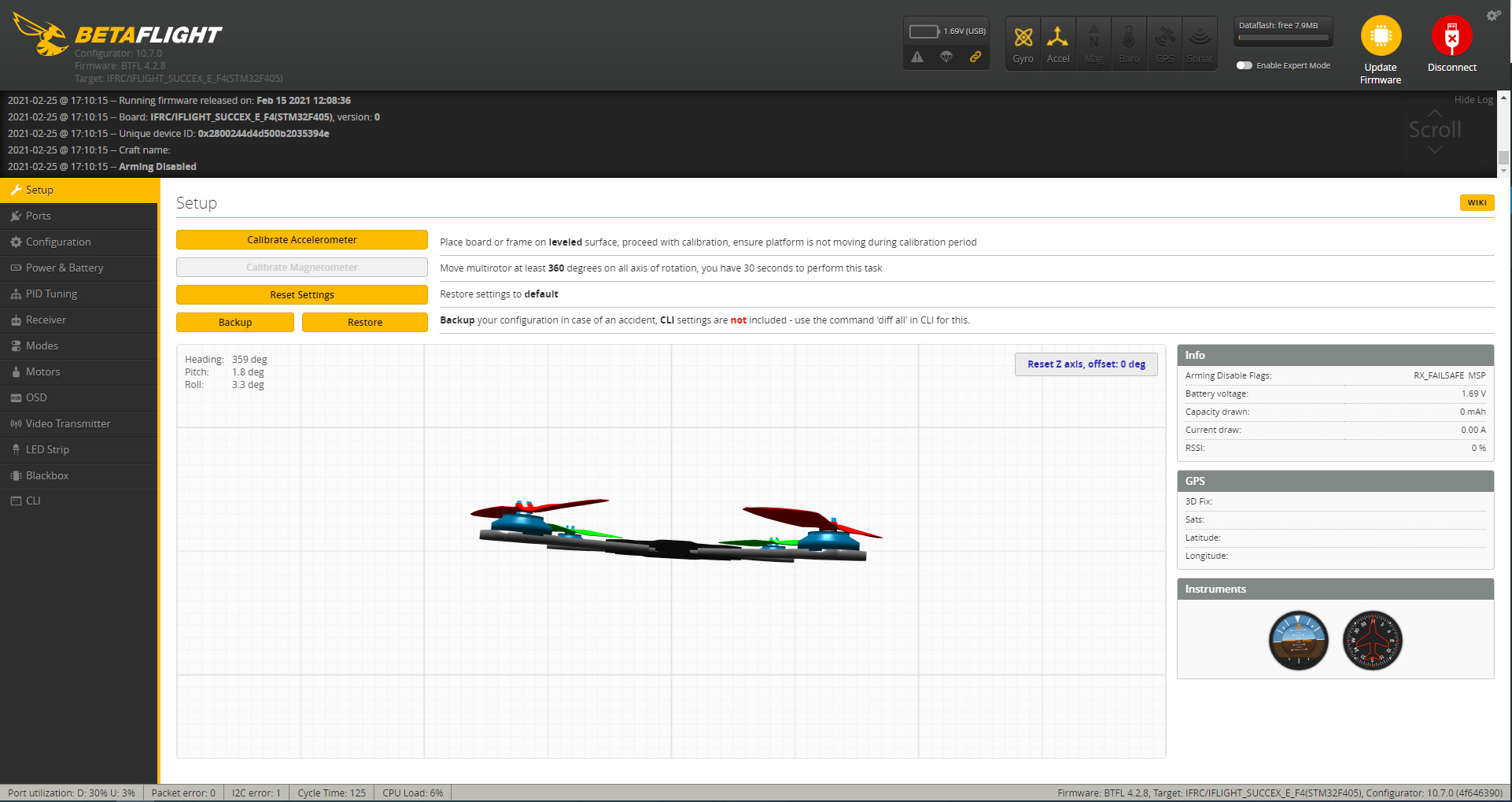
V horní liště vidíte napětí baterie (pokud je připojena), připojené senzory (zpravidla gyroskop a akcelerometr) a zaplnění vnitřní flash paměti desky (pokud ji deska má). Po připojení se zobrazí první ze záložek – záložka Setup. Nejužitečnějším prvkem na záložce je model koptéry na kterém si ověříte, zda-li je správně nastavena orientace řidicí jednotky. Pokud budete otáčet koptérou připojenou k PC, model koptéry by se měl naklápět stejným způsobem. Po nahrání firmwaru bude potřeba zkalibrovat akcelerometr. Položte koptéru na rovnou plochu a klikněte na Calibrate Accelerometer. Možností Reset Settings smažete vaše nastavení. Možnosti Backup a Restore slouží k zálohování a obnovení nastavení. V pravém sloupci Info vidíte některé informace o koptéře. Užitečný je řádek Arming Disable Flags, kde jsou vypsané důvody, proč koptéru nelze zaarmovat.
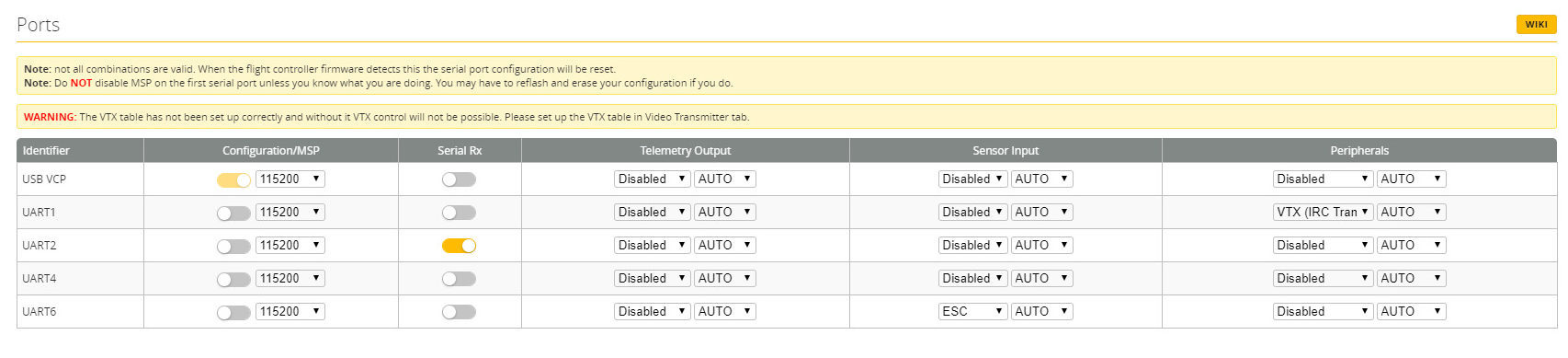
Další záložkou je záložka Ports. Zde definujete, co je připojené k UARTům. UART je univerzální rozhraní na desce, které má vysílací pin (TX) a přijímací pin (RX). K UARTům se připojují věci jako GPS, DJI FPV, RC přijímač, telemetrický vstup přijímače, ovládání video vysílače, vstup regulátoru, ovládání kamery a další. UARTy se nastavují podle toho, jaké je fyzické zapojení na desce. MSP (Multiwii serial protocol) slouží pro komunikaci s Betaflight configurátorem nebo s DJI FPV. Serial Rx povolíte u UARTu, ke kterému jste připojili seriový výstup RC přijímače (iBus, SBUS, CRSF,..). V našem případě máme zapojený SBUS na UART2. Telemetry Output vybereme, pokud na některý z UARTů je připojený telemetrický vstup přijímače. Nejčastěji Smart Port. Sensor Input je buď GPS nebo ESC. V našem případě používáme regulátory s BlHeli_32, které podporují telemetrii. Ta je podle schématu zapojení zapojena na R6. Peripherals obsahují další zařízení, které mohou být na UART připojeny. V našem případě se bude jednat o video vysílač podporující IRC Tramp protokol, zapojený na T1. Na této a na všech dalších záložkách jsou změny potřeba uložit tlačítkem save.
Další záložka Configuration je nejrozsáhlejší. V této záložce si nastavujete veškeré funkce, které má koptéra umět.
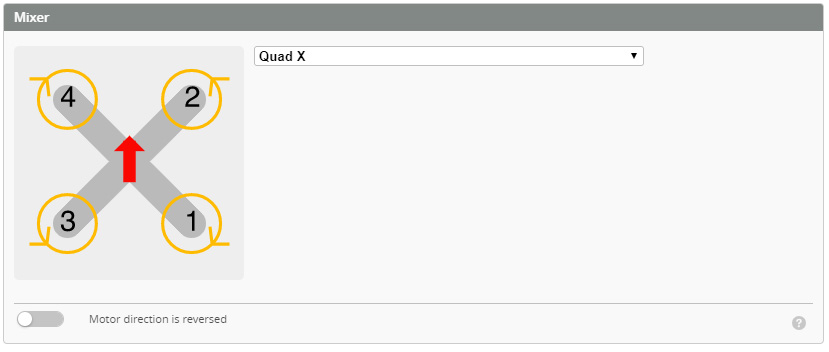
V okně Mixer si lze zvolit, jaké je rozložení koptéry. Ve většině případů půjde o kvadrokoptéru, nicméně Betaflight podporuje i hexakoptéry, oktokoptéry, křídla a další konfigurace a letadla. Také se zde dá prohodit směr rotace motorů. Někteří piloti opačnou rotaci preferují. Největší výhodou je, že vám posekaná tráva nelétá do kamery.
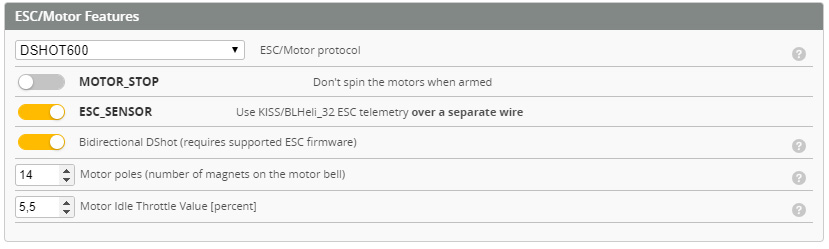
ESC/Motor Features slouží pro nastavení komunikace mezi řídicí jednotkou a regulátory. Důležité je nastavit si správný protokol. Všechny novější regulátory podporují Dshot600. Pokud máte whoopa s kartáčovými motory, vyberte možnost brushed. Funkce MOTOR_STOP zapříčiní, že po zaarmování se motory neroztočí. Tuto funkci nelze použít s funkcí Air Mode. ESC_SENSOR zapneme, pokud chceme použít telemetrii z regulátorů. Pro správnou funkci je třeba mít ESC zvolené jako Sensor input v záložce Ports. Regulátory pak budou řídicí jednotce posílat údaje jako je napětí, proud, otáčky motorů, teplota regulátoru a další. Pomocí Bidirectional DShot zapneme funkci, kdy regulátory budou posílat řídicí jednotce informace o otáčkách motorů. Ty se pak používají pro lepší filtraci vibrací pomocí RPM filtrů (o tom dále). Pro správný výpočet otáček motoru je třeba uvést, kolik má používaný motor pólů (magnetů). Tuto informaci najdete většinou u popisu motoru (12N14P), nebo magnety prostě spočítáte. Poslední možnost je velikost otáček na volnoběh.
V Board and Sensor Alignment se nastavuje orientace desky. Občas je vhodné řidicí desku namontovat do koptéry pootočenou, aby bylo přístupné USB a deska se lépe instalovala. Jakým způsobem je řidicí jednotka pootočená se nastaví v možnosti Yaw Degrees. Ostatní volby většinou není třeba upravovat.

Accelerometer Trim se běžně nepoužívá a přeskočíme ho. V okně Arming si zvolíte maximální náklon koptéry, při kterém bude armovat. Pokud je náklon koptéry větší, než zadaný úhel, koptéra nezaarmuje. Pokud zadáte úhel 180°, tuto funkci tím vypnete.

V okně System configuration nastavujete frekvenci výpočetní smyčky řidicí jednotky. Frekvenci vyčítání dat z gyroskopu je v nových verzí betaflightu nastavena fixně. Pro desky s F7 a F4 procesorem se obvykle nastavuje frekvence 8kHz. Pod nastavením frekvencí je zapínání a vypínání senzorů řidicí jednotky. Gyroskop je zapnutý vždy. Akcelerometr je používaný pro létání v módu angle. Lze tedy vypnout pokud létáte pouze v akrobatické módu. Některé desky obsahují barometr pro měření výšky. Ten se hodí zejména pro automatický návrat na místo vzletu, pokud máte připojenou GPS nebo pro zobrazování výšky v OSD. Magnetometr je na řidicí jednotce málokdy. I pokud řidicí jednotka magnetometr obsahuje, nedoporučuje se používat, protože velmi často bývá zarušen okolní elektronikou.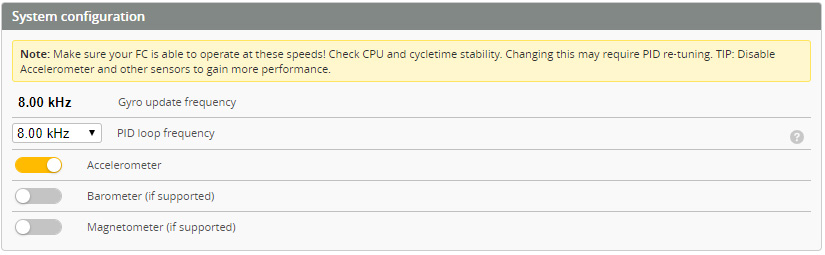
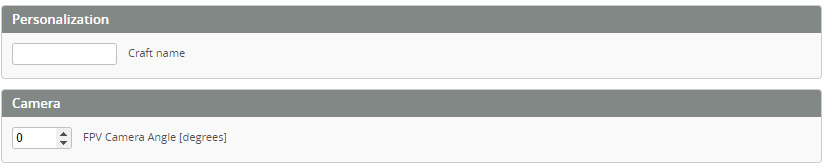
Personalization slouží k pojmenování vaší koptéry. Jméno lze zobrazit v OSD a zobrazí se v Blackbox logu. V Camera lze nastavit úhle vaší kamery. Ten lze pak použít v letovém módu FPV ANGLE MIX, kdy se koptéra při zatáčení otáčí podle osy kamery. Ve většině případů tuto možnost nevyužijete.
V okně Receiver si zvolíte, jakým způsobem je RC přijímač připojený k řidicí jednotce. Možnost PPM využijete, pokud váš přijímač neumí žádný ze sériových protokolů. Serial-based receiver je preferovaná možnost. Tu zvolíte, pokud přijímač podporuje digitální sériový protokol. V takovém případě musíte vybrat i protokol přijímače, nejčastější protokoly jsou SBUS nebo FPort pro Frsky, iBus pro Flysky, CRSF pro Crossfire. Pro správnou funkci sériového protokolu je třeba mít v záložce Ports vybranou možnost Serial Rx u příslušného UARTu. Možnost SPI RX support jsou používaná na některých deskách s integrovaným přijímačem. V našem případě zvolíme možnost Serial-based receiver a protokol SBUS.

Zapnutím RSSI_ADC v RSSI (Signal Strength) zapnete vyčítání síly signálu z analogového vstupu řidicí jednotky. Tento způsob je dnes již zastaralý a nepoužívá se. Současné přijímače posílají hodnotu RSSI v rámci sériového protokolu (CRSF) nebo jako hodnotu jednoho z kanálů.

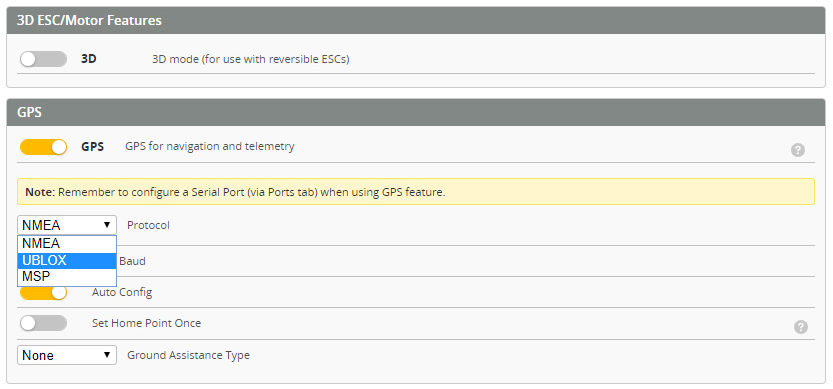
Další možností je 3D ESC/Motor Features. Touto volbou povolíte 3D režim, kdy koptéra může roztočit motory i na druhou stranu a létat vzhůru nohama. Pro správnou funkci je třeba mít 3D režim zapnutý i v regulátorech. Při běžném létání se 3D mód nepoužívá. V okně GPS pak můžete zapnout a nastavit připojený GPS modul. Pro správnou funkci je třeba mít v záložce Ports vybraný Sensor Input – GPS u příslušeného UARTu. Pokud povolíte GPS, je třeba zvolit správný protokol, který GPS modul využívá. V případě UBLOX protokolu můžete povolit i systém Galileo. Zbytek nastavení můžete nechat na výchozí hodnotě.
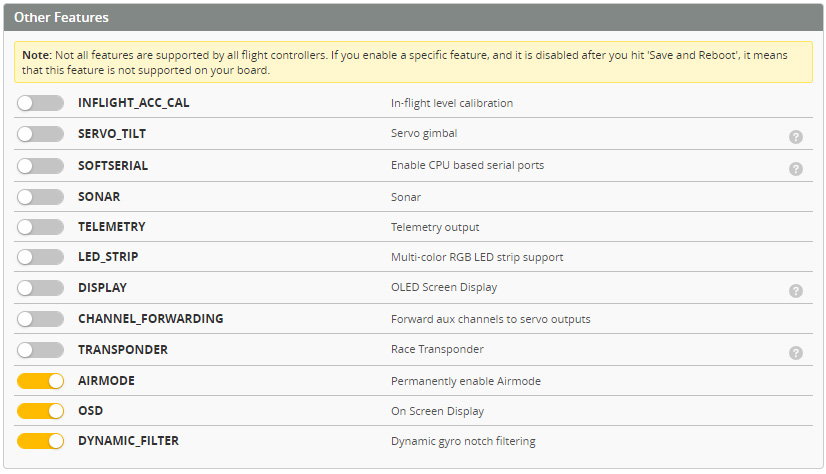
V okně Other Features lze zapnout/vypnout další funkce řídicí jednotky. INFLIGHT_ACC_CAL povolí režim, kdy je možné kalibrovat akcelerometr během letu, běžně se nepoužívá. SERVO_TILT slouží pro ovládání servo gimbalu. Lze také použít, pokud chcete některým kanálem z vysílačky ovládat servo. Funkce SOFTSERIAL slouží k zapnutí dalších UARTů. Ty lze použít, pokud je na desce málo hardwarových UARTů nebo pokud je potřeba mít UART s invertovanou logickou hodnotou (například pro Smart Port telemetrii). Softwarové UARTy nedosahují takových rychlostí, takže je vhodné je používat pro ovládání video vysílač, posílání telemetrie, případně pro GPS. SONAR umožnuje použít sonar pro měření výšky. Tato funkce se běžně nepoužívá. Pomocí TELEMETRY zapnete posílání telemetrických údajů z řidicí jednotky. Pro správnou funkci telemetrie je nutné mít na záložce Ports zvolený telemetrický protokol Telemetry Output u příslušného UARTu, nebo používat protokol přijímače, který telemetrii podporuje (FPort, CRSF,…). Funkce LED_STRIP povolí ovládání adresovatelných LED diod. Funkce DISPLAY povolí zobrazení dat z řidicí jednotky na připojeném displeji. Tato funkce se běžně nepoužívá. CHANNEL_FORWARDING je funkce, která umožní některý z kanálů RC přijímače poslat na výstup. Lze tak ovládat serva nebo jiné přislušentví pomocí PWM signálu. TRANSPONDER umožní používat některý ze systémů pro měření času na závodní trati. Běžně se nepoužívá. Funkce AIRMODE trvale zapne funkci airmode. Pokud není airmode vybraný zde, lze ho aktivovat v záložce Modes. Více o airmode později. OSD zapne OSD. Více o OSD později. DYNAMIC_FILTER zapne dynamický filtr pásmové zádrže (notch filter), kdy se frekvence, na které filtr filtruje, automaticky mění v závislosti na charakteru vibrací. Tuto funkci doporučujeme mít vždy zapnutou.
Okno Dshot Beacon Configuration slouží k nastavení pípání motorů. Pokud nemáte na koptéře pípák a používáte DShot protokol, lze pípat motory. V první nabídce si vyberete tón, kterým motory pípají. Volbou RX_LOST povolíte pípání motorů v případe ztráty signálu. Volbou RX_SET povolíte pípání motorů, pokud je aktivní režim BEEPER v záložce Modes.

V okně Beeper Configuration si můžete nastavit, kdy je aktivní pípák.
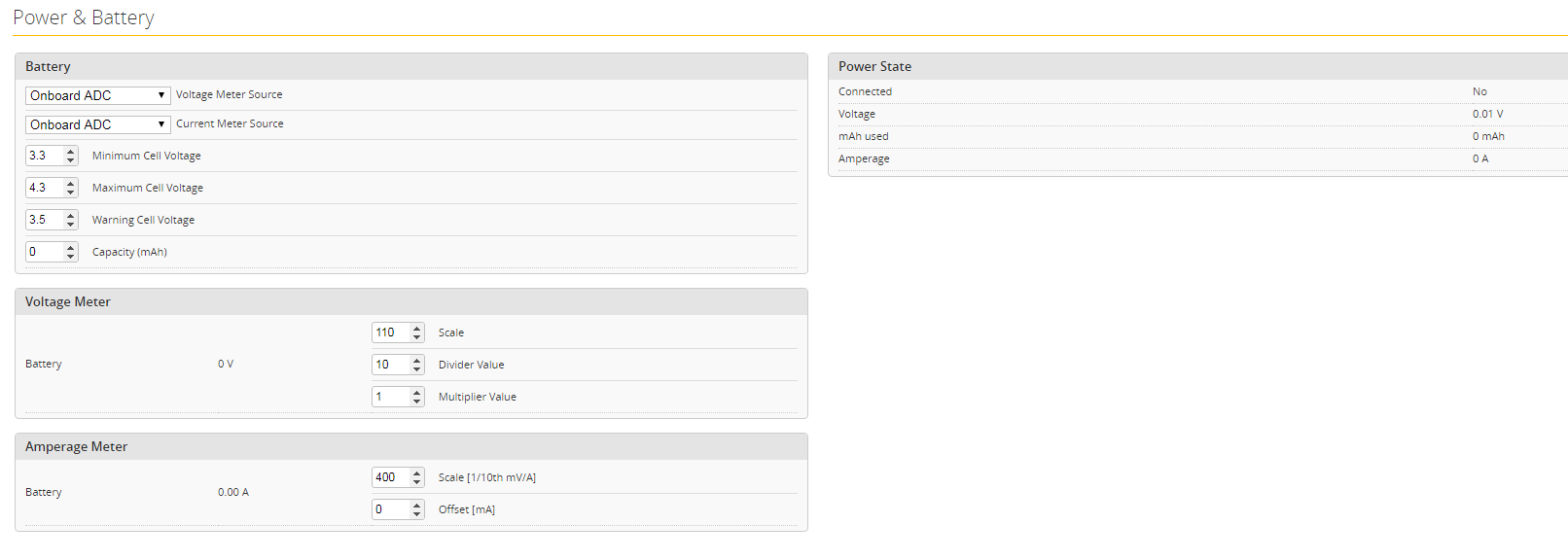
Další záložkou je Power & Battery. Zde se nastavuje, jakým způsobem řídicí jednotka snímá informace o napětí a proudu. Zdroj napětí zvolíte u Voltage Meter Source. Tím může být regulátor (pokud je aktivní správně nastavená telemetrie z regulátorů v záložkách Ports a Configuration) nebo Onboard ADC – AD převodní na řídicí jednotce. Vhledem k tomu, že většina řídicích jednotek má integrovaný BEC a napájí se přímo z baterie, Onboard ADC je nejčastější volba. Pokud deska nemá integrovaný BEC, najdete na ní pin označení VBAT nebo VSENS, pro měření napětí baterie. Další je Current Meter Source, kde si zvolíte zdroj snímání velikosti proudu. Onboard ADC je opět integrovaný AD převodník na desce. Tuto volbu vyberete, pokud ze senzoru proudu (obvykle součástí regulátorů 4v1) připojíte analogový výstup na vstup desky obvykle označovaný jako CUR. CUR obvykle bývá jeden z pinů v konektoru pro spojení regulátorů s řidicí jednotkou. Možnost ESC Sensor použijete, pokud používáte telemetrii z regulátorů. Pokud žádný proudový senzor na koptéře nemáte, ale přesto chcete alespoň nějaký přehled o spotřebované kapacitě baterie a velikosti proudu, lze využít možnost Virtual. Řidicí jednotka pak bude odhadovat spotřebu proudu v závislosti na poloze plynu. Možnost MSP Sensor/OSD Slave se běžně nepoužívá. Dále se nastavují hodnoty napětí jednotlivých článků baterie. Minimální napětí a maximální napětí slouží k automatické detekci počtu článků baterie. Pokud napětí baterie na článek klesne pod Warning Cell Voltage, koptéra začne prostřednictvím OSD nebo pípáku upozorňovat na vybitou baterii. Capacity (mAh) je kapacita, při které koptéra začne upozorňovat na vybitou baterii.
V okně Voltage Meter a Amperage Meter si zkalibrujete měření napětí a proudu. Při kalibraci napětí změřte napětí baterie multimetrem a upravte hodnotu Scale hodnotu tak, aby napětí změřené koptérou odpovídalo napětí na multimetru. Při kalibraci proudového senzoru nabijte baterii, vylétejte ji a poznamenejte si z OSD počet spotřebovaných mAh. Pak baterii nabijte a z nabíječky si poznamenejte, kolik mAh bylo do baterie dobito. Hodnoty porovnejte a trojčlenkou spočtěte novou hodnotu Scale. Občas můžete hodnoty pro senzor proudu najít na stánkách výrobce.
Okno Power State slouží pouze pro přehled základních informací o napětí, spotřebované kapacitě a proudu.
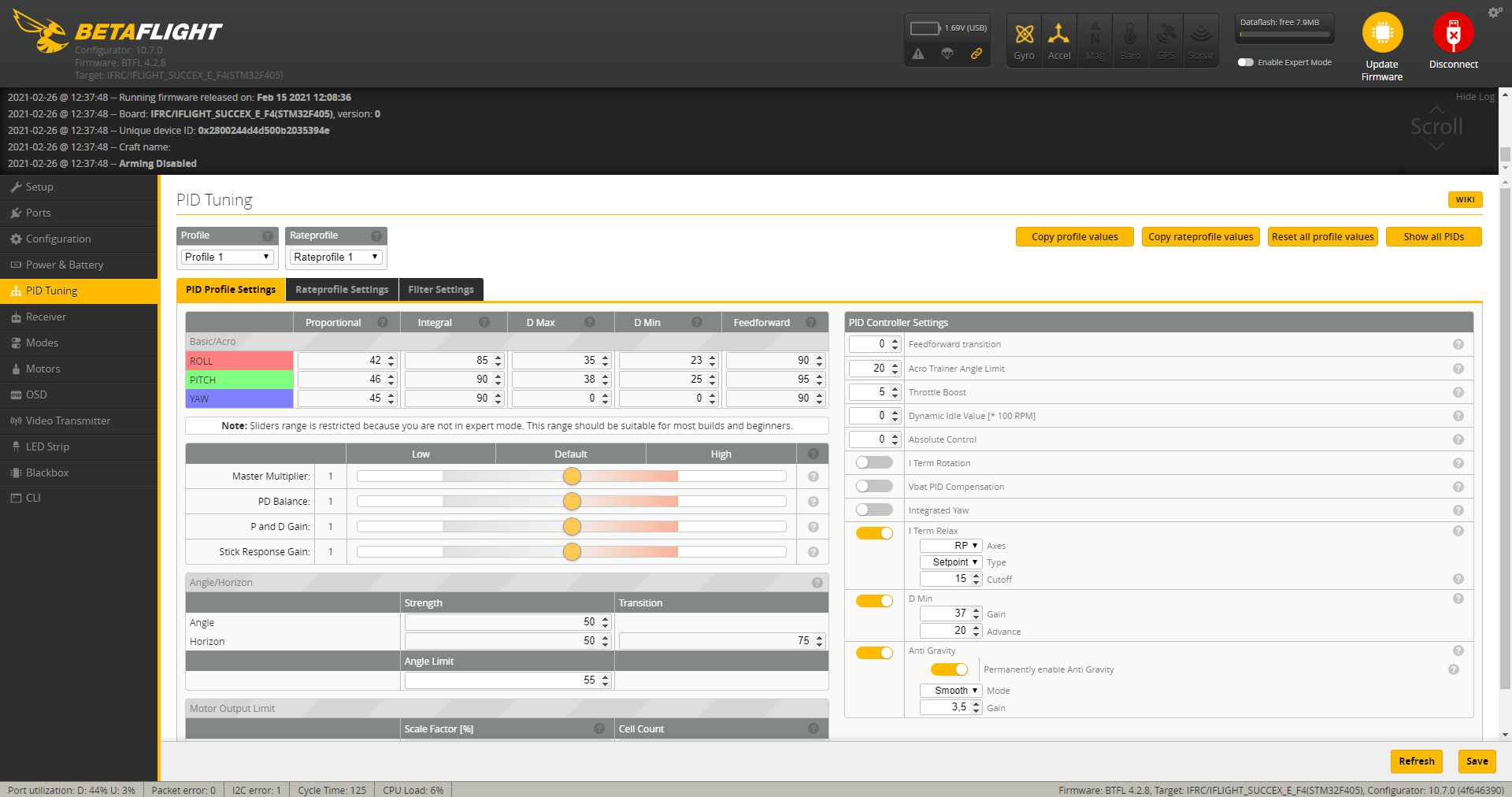
Další záložkou je PID Tuning. Najdete zde karty PID Profile Setting, Rateprofile Setting a Filter Setting. Lze si přednastavit několik profilů pro PID a rates, mezi kterými pak snadno můžete přepínat. Na kartě PID Profile Setting ladíte parametry řídicího algoritmu koptéry. Nastavování těchto parametrů je poměrně komplikované a chce to mít již alespoň základní znalosti z teorie řízení. V této kapitole se mu věnovat nebudeme. Ve většině případů létá koptéra s výchozím nastavením dobře a není třeba nic měnit. Špatným nastavením parametrů může koptéra létat nepředvídatelně, případně může dojít ke spálení motorů a regulátoru. V novějších verzích betaflightu lze měnit hodnoty PID regulátoru pomocí sliderů, což nastavování trochu usnadňuje. U malých a lehkých 2-3″ koptér může být občas žádoucí snížit hodnotu Master Multiplier.
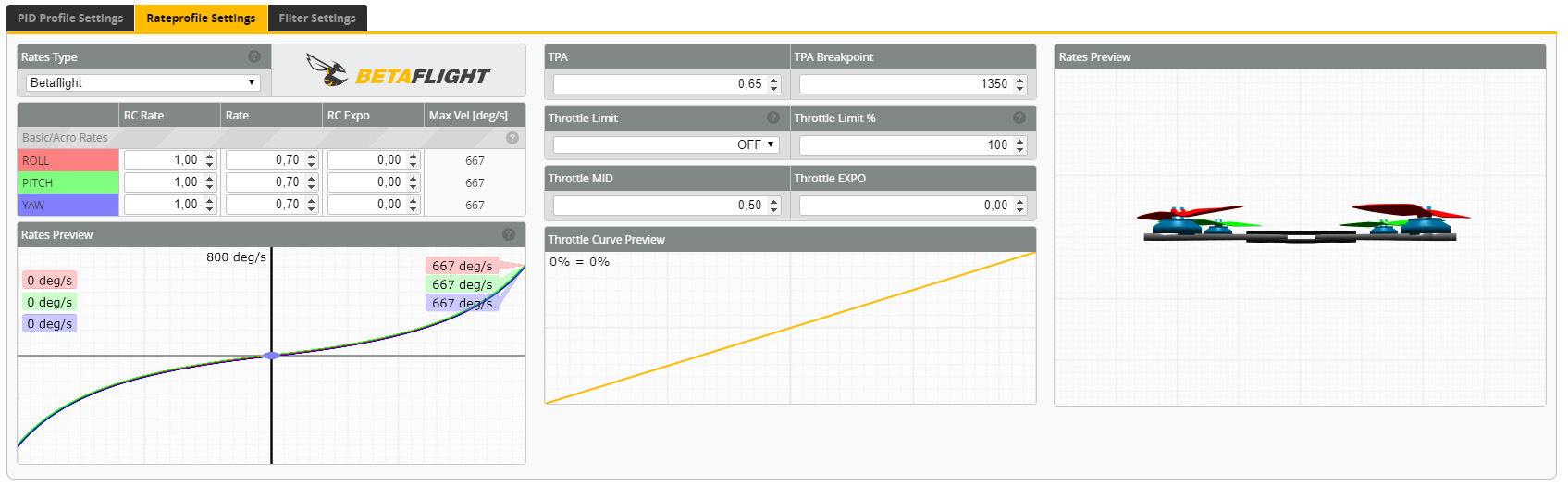
Na kartě Rateprofile Settings nastavujete citlivost koptéry v závislosti na poloze kniplu vysílačky. Rates jsou velmi individuální a každému pilotovi sedne něco jiného. Pokud však začínáte, výchozí hodnoty jsou dobrý start. V okně Rates Preview je vidět křivka, která znázorňuje rychlost otáčení koptéry oproti poloze kniplu. Hodnotou RC Rate měníte rychlost otáčení v celém rozsahu kniplu. Hodnota Rate mění rychlost otáčení pouze při vyšších výchylkách kniplu. Střed tedy zůstává stejný. RC Expo proloží křivku exponenciálou. Maximální rychlost otáčení zůstává stejná, křivka se více prohne a chování koptéry je v okolí středu kniplu tupější. Okna TPA a TPA Breakpoint souvisí s PID regulátorem a věnovat se jim nebudeme. Pro začínající piloty je zajímavá funkce Throttle Limit, která umožní omezit maximální plyn. Koptéra pak není tak citlivá a rychlá. V okně Throttle Limit si v procentech nastavíte hodnotu maximálního plynu. V okně Throttle Limit si můžete vybrat mezi možnostmi SCALE, která roztáhne omezený plyn na celou dráhu kniplu, a CLIP, která pouze uřízne horních X procent plynu, a horní část polohy kniplu nechá beze změny. V Throttle EXPO si můžete nastavit exponenciální průběh křivky plynu. Pomocí Throttle MID si zvolíte střed exponenciály. Ten je vhodné nastavit na takovou polohu plynu, ve které běžně letíte vpřed.
Na kartě Filter Setting se mění nastavení filtrů řidicí jednotky. Ty se snaží odstranit vibrace z dat z gyroskopu. Pokud nevíte přesně co děláte, nechte hodnoty ve výchozím nastavením. Pokud filtry nastavíte špatně, můžete spálit motory nebo regulátor.
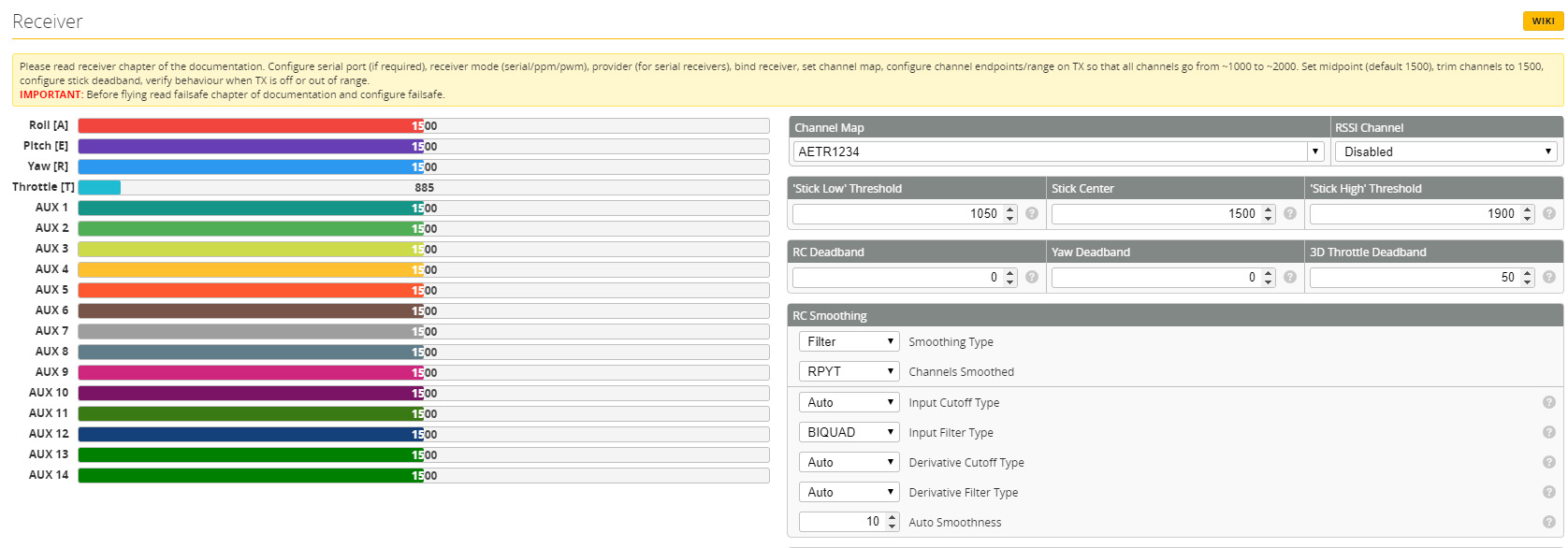
Záložka Receiver slouží pro nastavení přijímače a ověření jeho funkcionality. V levé částí okna je hodnota jednotlivých přijatých kanálů. Rozsah kanálů je zpravidla 1000-2000. Tato hodnota vychází z šířky pulzu v uS ve staré PWM modulaci. Zde si ověříte, že řídicí jednotka přijímá signály správným způsobem, jak je máte na vysílačce nastavené. Pokud kanály nereagují na změnu pozice kniplů, máte přijímač špatně připojený nebo nastavený. Různé vysílačky používají různé pořadí kanálů. Pořadí kanálů lze nastavit v nastavení Channel Map. Lze si vybrat z přednastavených kombinací nebo pořadí napsat ručně. Některé přijímače posílají sílu přijatého signálu na jednom z kanálů. Tento kanál zvolíte v nastavení RSSI Channel. Hodnotami ‚Stick Low‘ Threshold a ‚Stick High‘ Threshold měníte práh pro detekci kanálu, zda-li je v dolní nebo horní poloze. Betaflight vás nenechá zaarmovat, pokud nemáte stažený plyn, přesněji pokud není hodnota plynu pod hranicí ‚Stick Low‘ Threshold. Hodnoty RC Deadband, Yaw Deadband a 3D Throttle Deadband určují velikost pásma necitlivosti. Tyto hodnoty doporučujeme ponechat ve výchozím natavení. V okně RC Smoothing lze nastavit vyhlazení RC signálu. Protože řídící smyčka operuje na vyšších frekvencích než RC přijímač (8kHz PID loop vs. 250Hz TBS Tracer), je třeba RC signál nějakým způsobem dopočítat a vyhladit. Výchozí nastavení není třeba měnit.
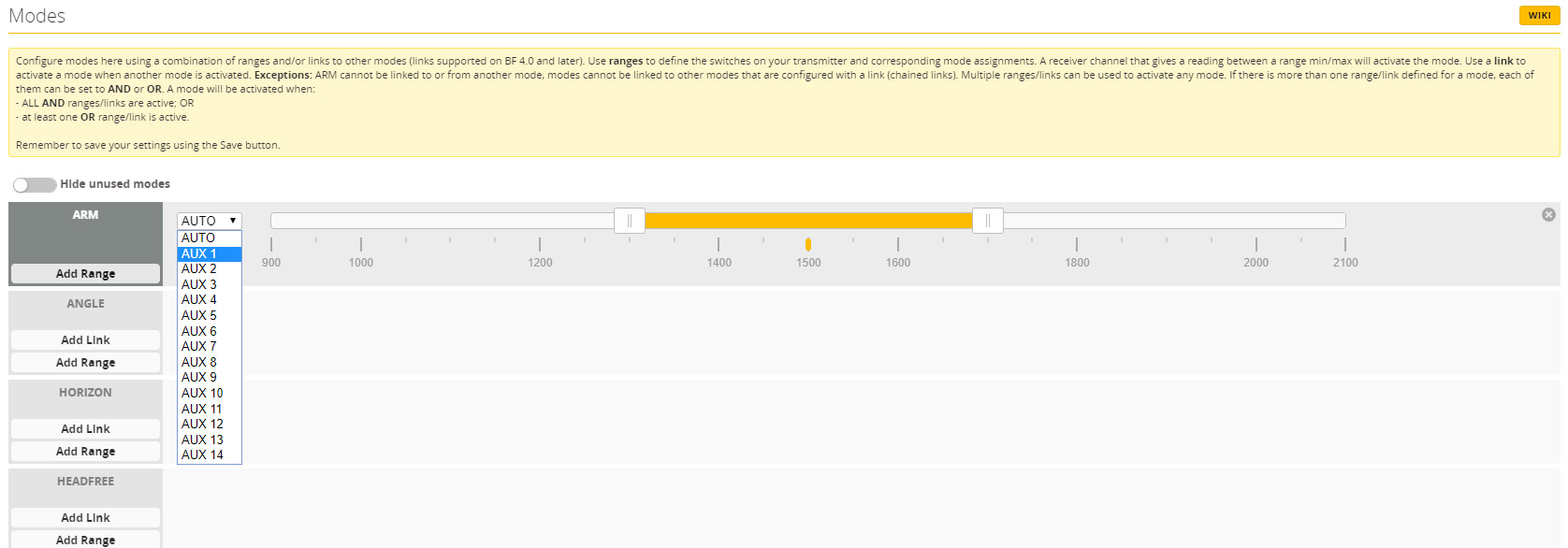
Další poměrně obsáhlou záložkou je záložka Modes. Zde přiřazujete jednotlivým AUX kanálům další funkce, které si projdeme. Pro zapnutí funkce je třeba přidat rozah, ve kterém je funkce aktivní. To uděláte pomocí tlačítka Add Range. Dále si vyberete, kterým AUX kanálem budete funkci aktivovat. Pokud necháte AUTO a pohnete přepínačem, AUX kanál se přiřadí sám. Na obrazovce se zobrazí rozsah kanálu, při kterém je funkce aktivní. Meze rozsahu upravte tak, aby byla funkce aktivní ve vámi požadované poloze přepínače. Aktuální hodnota kanálu je na ose zvýrazněna. Funkcí Add Link, můžete sloučit aktivaci funkce s jinou funkcí. Funkce se aktivuje tehdy, pokud je aktivní mateřská funkce. Funkce Add Range stačí a Add Link není třeba obvykle využívat.
Nyní si popíšeme nabízené funkce. Nabídka funkcí se může lišit v závislosti na tom, které funkce jsou povoleny v dalších záložkách.
Nejdůležitější funkce je ARM, kterou se „nastartují“ motory a koptéra se připraví k letu. Armování mějte vždy nastaveno na přepínači, který je rychle dostupný, abyste mohli koptéru v jakémkoli případě okamžitě disarmovat a motory zastavit. Aby se ARM aktivoval, musí být splněna řada bezpečnostních podmínek. Pokud ARM nefunguje, příčinu se dozvíte v záložce Setup na řádku Arming Disable Flags.
ACRO je nejpoužívanější letový režim. V záložce Modes ho nenajdete. Je to výchozí letový režim, který je aktivní, pokud není vybrán jiný letový režim. Acro využívá pouze dat z gyroskopu. Vysílačkou ovládáte úhlovou rychlost koptéry. Pokud je tedy knipl ve středu, koptéra zůstává ve stejné pozici a nestabilizuje se do roviny.
ANGLE je jeden z letových režimů koptéry. Koptéra se stabilizuje do horizontální polohy a vysílačkou ovládáte úhel náklonu.
HORIZON je další z letových režimů. Je to hybrid mezi režimy Angle a Acro. Kolem středu kniplu se koptéra chová jako v režimu angle, v krajních polohách se chová jako v režimu acro. Přechod mezi režimy angle a acro lze nastavit na záložce PID Tuning na kartě PID Profile Settings v okně Angle/Horizon na položkou Transition.
HEADFREE je funkce, kdy otáčení v osách pitch a roll je nezávislé na otáčení v ose Yaw. Jinými slovy, dopředu je pořád jedním směrem, bez ohledu na otočení koptéry. Pro FPV létání nepoužitelné. Headfree (někdy headless) mód se občas používá u menších dronů připomínajících hračky. HEADADJ nastaví nový směr pro HEADFREE režim.
FAILSAFE nastane při výpadku RC signálu vysílačky. Failsafe je většinou aktivovaný automaticky, nicméně lze aktivovat i prostřednictvím přepínače.
BEEPER zapne pípání pípáku nebo motorů.
LEDLOW vypne adresovatelné LED diody (pokud jsou zapojeny).
OSD DISABLE SW vypne OSD.
BLACKBOX zapne nahrávání blackbox dat. Pokud není vybráno, nahrávání se spustí automaticky po armu.
AIR MODE je funkce (nikoli letový režim, jak si spoustu lidí myslí), která zajištuje plnou manévrovatelnost i při nízké hodnotě plynu. Ze své podstaty se dron naklání tak, že na jedné straně zvýší otáčky motorů a na druhé ubere. Pokud jsou otáčky motorů nízké, již není kam víc otáčky motorů snižovat a koptéra může být nestabilní. Air mode zapříčiní to, že pokud by tato situace měla nastat, koptéra sama zvýší otáčky na všech motorech, aby na jedné straně mohla přidat a na druhé dostatečně ubrat. Z tohoto důvodu není při zapnutém air mode možné použít funkci motor stop. Toho se využívá především při akrobacii, kdy často stáhnete plyn úplně dolů a padáte. Pokud je air mode aktivovaný, koptéra je stále plně stabilní. Nevýhodou je, že při přistání, když se koptéra dotkne země, má tendenci náraz vyrovnat a poskakuje. Zároveň, když trefíte branku nebo strom, koptéra se snaží velkou výchylku způsobenou nárazem vystabilizovat a vystřelí několik metrů do vzduchu.
FPV ANGLE MIX změní osu pro otáčení koptéry podle nastaveného úhlu kamery.
BLACKBOX ERASE smaže blackbox záznamy a uvolní paměť desky.
CAMERA CONTROL funkce pro ovládání kamery, pokud to podporuje.
CAMSTAB funkce pro stabilizaci servo gimbalu, pokud je povolená možnost SERVO_TILT
FLIP OVER AFTER CRASH je funkce, která slouží k otočení koptéry, která je „vzhůru nohama“. Pro správnou funkci je třeba používat DShot protokol. Pokud je funkce FLIP OVER AFTER CRASH aktivní, po zaarmování bude koptéra reagovat pouze na kanály roll a pitch. Vždy dva motory se roztočí na druhou stranu než obvykle a pokusí se koptéru otočit. V tomto režimu se ovládají přímo otáčky motorů a je třeba otáčení provádět trochu s citem. Není dobré otáčení provádět například ve vysoké trávě. Pokud jsou motory zablokované, přílišným snažením by se mohly spálit. Po úspěšném otočení stačí disarmovat, funkci deaktivovat a pokud jsou vrtule v pořádku tak znovu zaarmovat a letět.
PREARM je bezpečnostní funkce, která má zabránit nechtěnému zaarmování koptéry. Aby se dala koptéra zaarmovat, je třeba, aby byl aktivní i prearm.
VTX PIT MODE přepne video vysílač do PIT módu, kdy vysílá velmi nízkým výkonem a neruší tak ostatní piloty. Video vysílač také tak nehřeje. Pro správnou funkci je třeba mít správně nastavený vysílač s IRC Tramp nebo TBS Smart Audio protokolem.
PARALIZE je funkce navržená pro závodní létání. Po aktivaci funkce řídicí jednotka odpojí video vysílač a RC přijímač, takže neruší ostatní piloty a koptéra nemůže být znovu řízena.
ACRO TRAINER je letový mód určený zejména pro začínající piloty. Řídíte úhlovou rychlost stejně jako v režimu acro, ale dron nepřeklopíte více, než je nastavený mezní úhel. Nestane se vám tedy, že se nedopatřením vzhůru nohama pod plynem zavrtáte do země.
DISABLE VTX CONTROL funkce, která zabrání nastavení video vysílače prostřednictvím betaflightu. Video vysílač lze pak nastavit například pomocí tlačítka.
GPS RESCUE aktivuje automatický návrat k místu vzletu. Tato funkce je k dispozici pouze při použití GPS modulu.
LAUNCH CONTROL je funkce pro závodní létání, která umožní koptéru na startovním stojánku lépe naklopit pro rychlý start.
Funkcí je v betaflightu poměrně hodně. V základu stačí mít nastavený ARM, BEEPER a případně ANGLE a FLIP OVER AFTER CRASH.
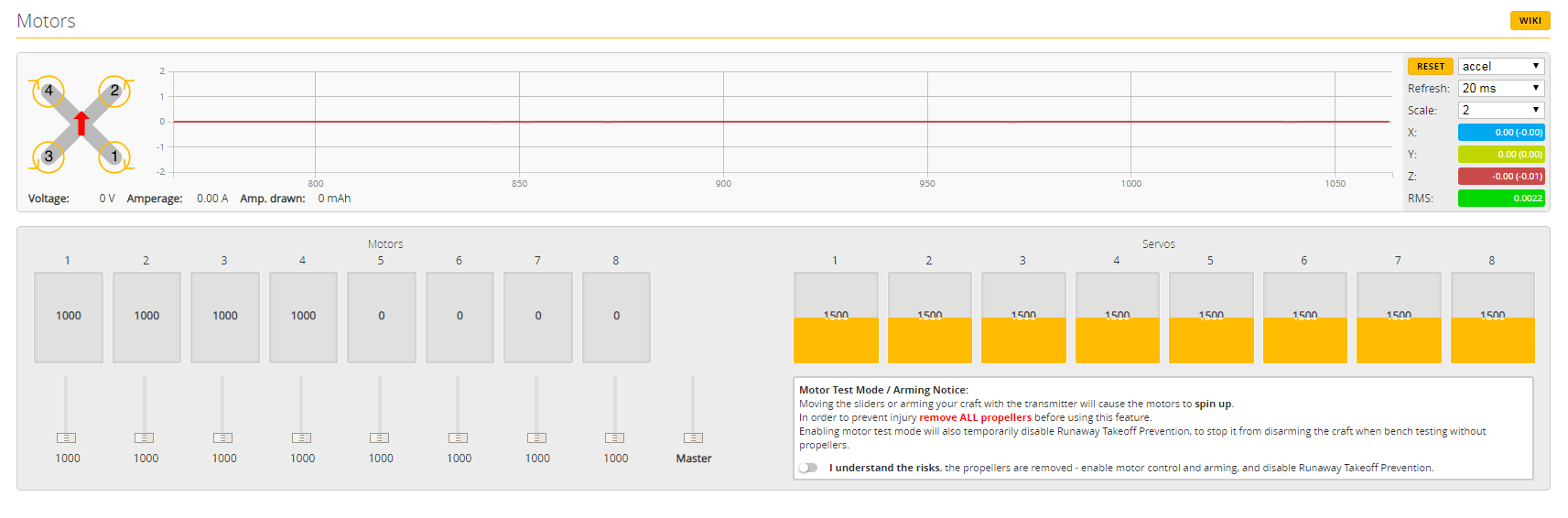
Další záložkou je záložka Motors. Ta slouží pouze ke zkoušení motorů, jejich pořadí a orientace. Před připojením baterie se ujistěte, že máte všechny vrtule sundané. Pro povolení roztáčení motorů je třeba zakliknout přepínač vpravo I understand the risks. Poté lze pomocí táhle roztáčet jednotlivé motory. Pomocí táhla Master je možné roztočit všechny motory najednou. Zkontrolujte si, zda se motory točí ve správném směru a zda se roztáčí správný motor. Pořadí motorů a směr rotace jsou znázorněny na obrázku. V horní části obrazovky je graf, který ukazuje data z akcelerometru nebo gyroskopu. Pokud bude některý z motorů ohnutý, koptéra bude hodně vibrovat a vibrace se projeví v grafu. Pokud máte povolený Bidirectional DShot, zobrazí se také informace o otáčkách motoru a procento chyb v přenosu telemetrie (které by mělo být 0).
V další záložce se nastavuje OSD – telemetrické informace, které se zobrazí v obrazu. OSD má 3 profily, které si můžete přednastavit a pak si mezi nimi přepínat. Většinou postačí používat jeden. V OSD se dá zobrazit velké množství informací, nicméně méně je někdy více. Určitě se hodí vidět napětí baterie (Battery Voltage), letový čas (Timer 2), varování (Warnings), upozornění na armování (Disarmed) a síla signálu (RSSI Value). Občas se hodí výška, spotřebovaná kapacita baterie a proud. V případě používání GPS také směr k místu vzletu, počet satelitů, rychlost, celková vzdálenost a vzdálenost od místa vzletu. Věci jako umělý horizont, G přetížení, letový režim nebo otáčky motorů k běžnému létání nepotřebujete. Uprostřed je náhled rozvržení elementů v OSD. Element v OSD přesunete v náhledu pomocí myši. V okně Active OSD profile si pak vybere aktivní OSD profil, který se vám zobrazí. V okně Timers můžete změnit nastavení měření času. Vhodný je Timer 2, který zobrazuje dobu zaramování. V okně Alarms si můžete nastavit hodnoty, při jejichž překročení začnou elementy v OSD blikat.
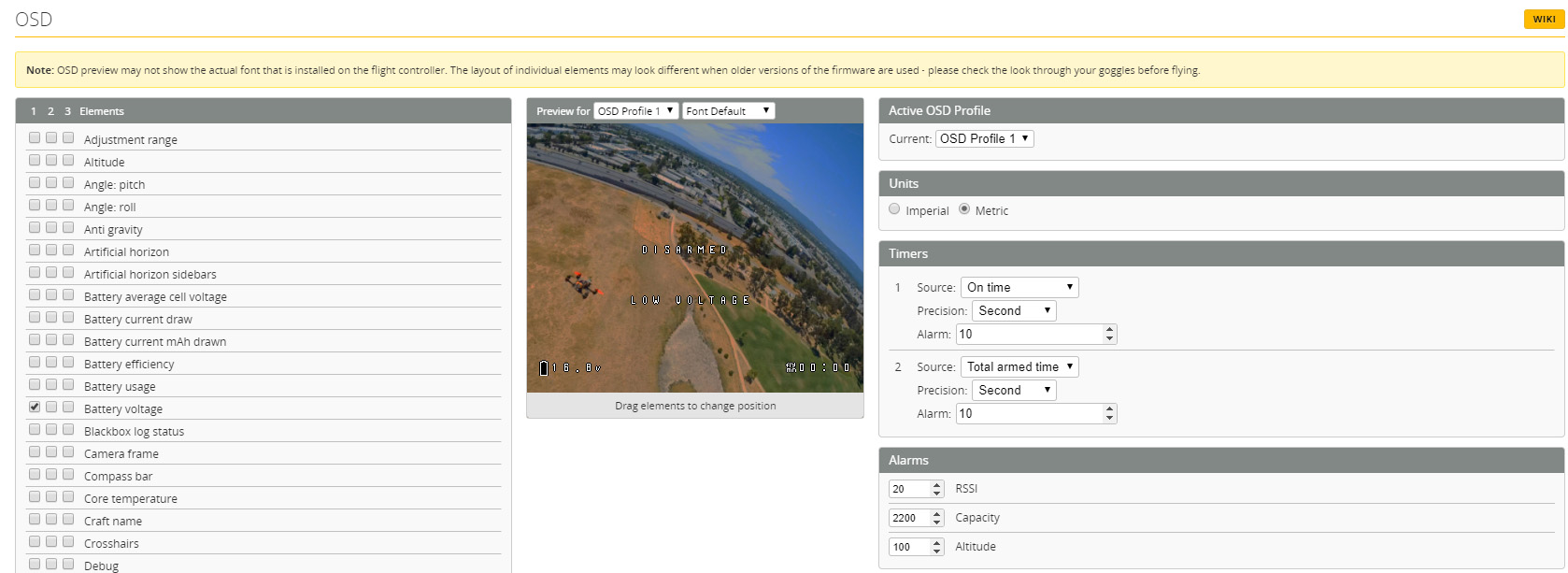
V okně Warnings si vyberete, na které věci chcete být v OSD upozorňováni. Jednotlivé varování se zobrazí na pozici elementu Warnings. Po disarmování koptéry se v OSD zobrazí statistika letu. Jaké prvky se mají zobrazit ve statistice si zvolíte v okně Post Flight Statistics. Do OSD lze také nahrát jiný font a vlastní úvodní logo.

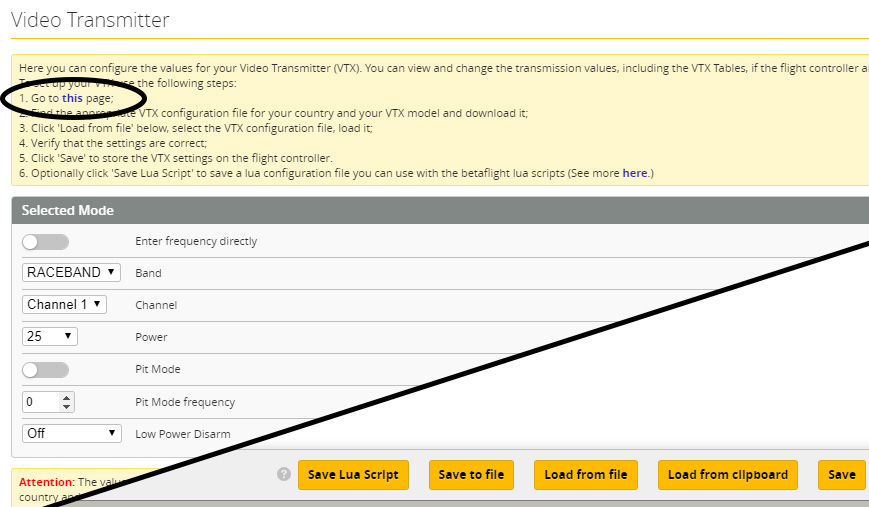
V záložce Video Transmitter se nastavuje ovládání video vysílače přes řídící jednotku prostřednictvím protokolů IRC Tramp nebo TBS Smart Audio. Jaký protokol používá váš video vysílač se dozvíte v manuálu nebo na stránkách výrobce. Protokol zvolíte v záložce Ports u příslušného UARTu. Nejprve je třeba do Betaflightu nahrát tabulku s frekvencemi – VTX Table. Tu si stáhnete z webu, na který odkazuje Betaflight Configurátor. Podle video vysílače vyberete příslušný soubor IRC Tramp (USA), SmartAudio 2.0 (USA) nebo SmartAudio 2.1 (USA). Pokud stáhnete EU verzi, bude dostupná možnost výkonu pouze 25mW. Stažený soubor nahrajete pomocí tlačítka Load from file a tabulku uložíte.
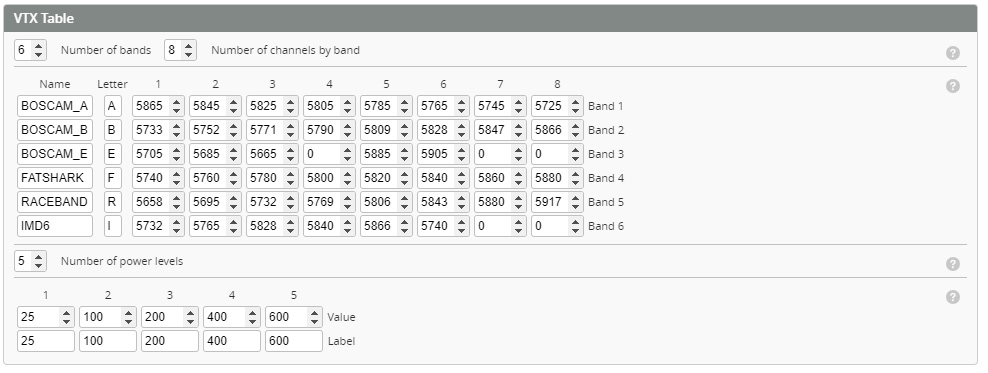
Nyní v okně VTX Table vidíte jednotlivé kanály a pásma a jim odpovídající frekvence. Na tabulce frekvencí není třeba nic měnit. Počet úrovní výkonu a jejich hodnoty si upravíte podle vašeho video vysílače. Hodnota Value je hodnota výkonu. IRC Tramp používá hodnotu v mW. SmartAudio 2.0 používá číslování 1,2,3,.. a SmartAudio 2.1 používá hodnotu v dBm (14, 20, 26, 28,..). Hodnota Label je nápis, který se pro danou hodnotu zobrazí v OSD.
V okně Selected Mode lze měnit pásmo (Band), kanál (Channel) a výkon (Power) video vysílače. Také je možnost zapnout Pit Mode, kdy video vysílač vysílá na minimálním výkonu a neruší tak ostatní piloty. Šikovná funkce je Low Power Disarm, kdy video vysílač vysílá nízkým výkonem dokud nezaarmujete a nehřeje tak, když čekáte na ostatní piloty nebo GPS satelity. Pokud zvolíte možnost Enter frequency directly, můžete zadat konkrétní frekvenci, na které má video vysílač vysílat.

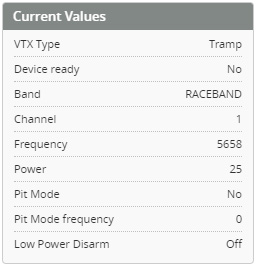
V okně Current Values vidíte přehled aktuálního nastavení video vysílače.
Předposlední záložka je nastavení černé skříňky – Blackboxu.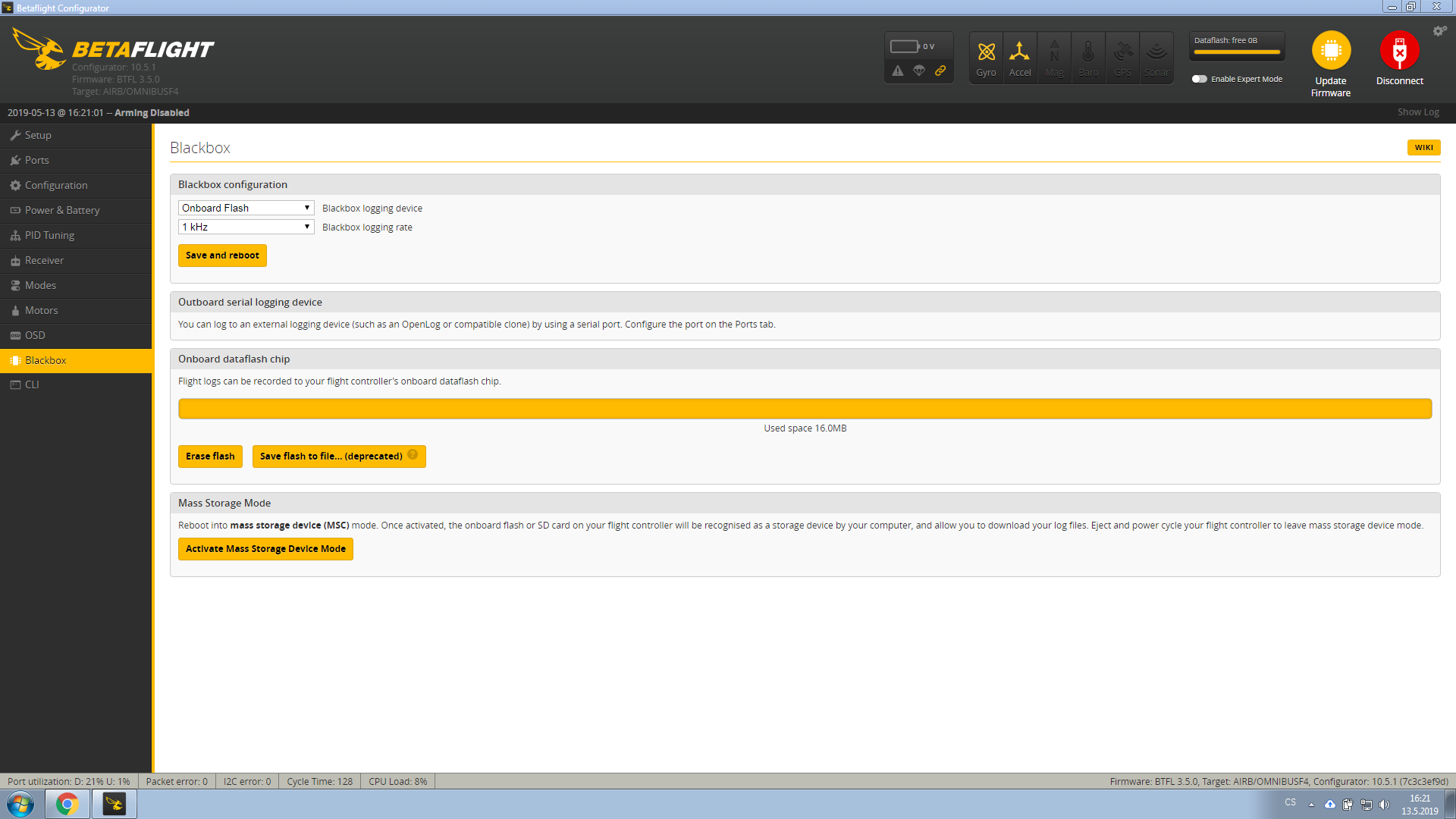
Blackbox slouží k ukládání veškerých dat z koptéry. Když chcete ladit parametry řidicího algoritmu, filtry a nebo jen z nějakého důvodu vaše koptéra nelétá tak, jak by měla, blackbox vám může usnadnit hledání příčiny. V nastavení Blackbox configuration volíte, kam a jak rychle se data ukládají. Některé desky mají vnitřní Flash paměť, jiné mají slot na SD kartu. Někdy je třeba použít externí modul. Doporučujeme logovat data se vzorkovací frekvencí alespoň 2kHz. Okno Onboard dataflash chip slouží pro smazání a stažení záznamů. Některé desky lze pomocí tlačítka Activate Mass Storage Device Mode přepnout do režimu, kdy se tváří jako připojená Flashka a soubory lze snadno spravovat.
Poslední záložkou je konzole (CLI).
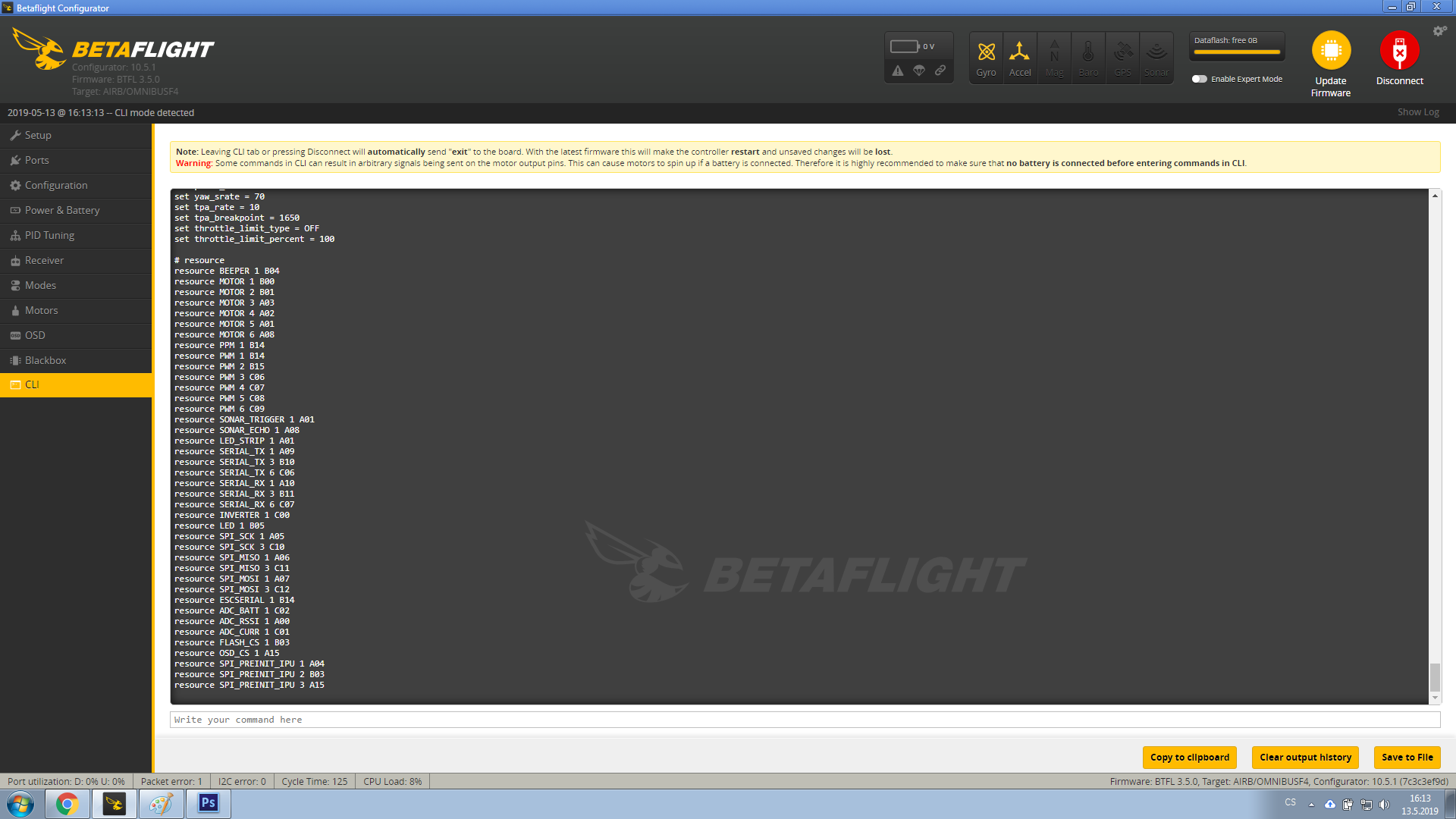
Pomocí konzole a správných příkazů lze nastavovat celá řidicí jednotka. Popis příkazů naleznete zde. V praxi se přes konzoli nastavují pouze novinky, které jsou zaimplementovány ve firmware, ale nejsou ještě dodělány do konfigurátoru pro pohodlnější nastavení. Přes konzoli se také děla přemapování jednotlivých výstupů. Pomocí příkazu resource můžete jednotlivé funkci přiřadit pin procesoru. To se obvykle používá pro zpřeházení pořadí motorů.