Krátký úvod do regulátorů. K čemu na koptéře jsou, co je BlHeli a jak s nimi komunikuje řídicí jednotka? Regulátor (ESC – Electronic Speed Controller) slouží k řízení otáček jednotlivých motorů na základě povelů z řídicí jednotky. Regulátorem se potkáte jako se samostatnou komponentou, 4 regulátory na jedné desce a nebo s regulátory, které jsou součásti řidicí jednotky. Každý regulátor má napájení, kabel pro signál z řidicí jednotky nebo přijímače a ty pokročilejší mají i telemetrický výstup, kdy můžou posílat telemetrii do řidicí jednotky jako je napětí, proud, otáčky motoru, teploty a další.
Samostatné regulátory se používají převážně na letadlech. Občas se s nimi potkáte na koptérách na freestyle, ale postupně mizí. Nevýhodou samostatných regulátorů je složitější drátování, náročnější stavba a větší hmotnost. Výhodou je, že když vám regulátor odejde, nemusíte měnit celou desku.

4 regulátory na jedné desce jsou mezi FPV koptérami nejrozšířenější. Regulátor zabírá v koptéře nejméně místa a s řidicí jednotkou se spojí pomocí kabelu s konektorem. Instalace je tak velmi snadná. Pozor každý výrobce může používat jiné pořadí pinů v konektoru a je třeba si ho před zapojením zkontrolovat. Regulátory se stejně jako řídicí jednotky dělají v několika velikostech.
Regulátory spojené s řidicí jednotkou se používají tam, kde je třeba ušetřit místo a hmotnost. Nejčastěji se s nimi setkáte na Whoopech, Tootpickách a ultralightech. Kvůli malému místu na desce se toto spojení obvykle nehodí na silné koptéry s velkou spotřebou.


Při výběru regulátoru se zaměřte na rozměry (podle rámu), maximální proud (podle motorů) a podporované napětí (podle baterie). Tady je orientační přehled, vždy se ale řiďte podle výkonových testů konkrétních motorů. Při stavbě koptéry velmi doporučujeme přidat na regulátor externí kondenzátor, který odfiltruje napěťové špičky způsobené motory a pomůže tak ochránit regulátor.
- 6A – Whoopy a nejmenší kopétry, motory 0703-0802
- 12A – menší stroje 2-3″, motory 1104-1108
- 20A – středně velké stroje 3-4″, motory 1404-2204
- 30A+ – klasické 5″ – 7″ koptéry, motory 2206-2408
Pájení
Protože přes regulátory teče velké množství proudu, měděné cesty jsou silné a během pájení odvádějí teplo. Pro pájení regulátorů je tak potřeba mít dostatečné výkonnou pájku a ideálně i větší hrot. Než začnete motory a přívodní napájecí kabel pájet, je třeba si všechny plošky na regulátoru důsledně pocínovat. Po pájení regulátor pečlivě prohlédněte. Pokud pájíte na vysokou teplotu nebo se špatným tavidlem, během pájení mohou odskakovat malé kuličky cínu. Pokud na desce zůstanou a po čase se dostanou na nevhodné místo, regulátor může shořet.
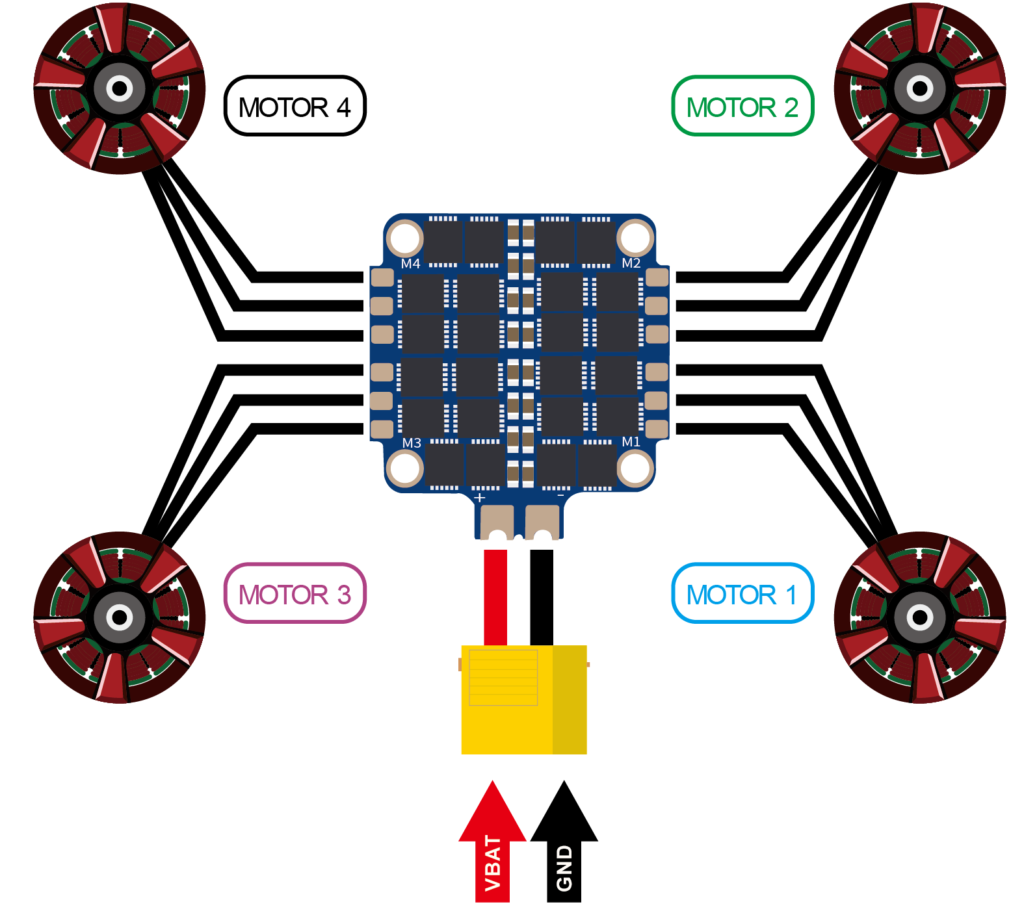
Styl zapojení je snadný. Motory vždy pájejte tak, aby koptéra vypadala hezky a snadno se stavěla. Na pořadí kabelů mezi motorem a regulátorem nezáleží. Prohozením dvou kabelů mezi motorem a regulátorem se změní směr rotace motoru, ten lze však změnit i později v nastavení regulátoru. Motor je vždy třeba pájet na výstup jednoho regulátoru – tedy z kraje na 3 sousedící plošky.
Firmware
BLHeli_S nebo BLHeli_32 jsou nerozšířenější firmwary pro regulátory na závodní koptéry. Firmware se aktualizuje a nastavuje přes konfigurátor BLHeli Suite skrze řídicí jednotku. Ve firmware regulátoru lze nastavit spoustu parametrů, výchozí nastavení je však pro motory, které se používají na závodních koptérách, vhodné a kromě směru otáčení motorů není třeba nic měnit. Regulátory s firmware BLHeli_32 používají lepší procesor a podporují nejnovější funkce jako je posílání telemetrie do řídicí jednotky nebo obousměrný (bidirectional) DSHOT. Alternativa k BLHeli_S může být firmware Bluejay.
Protokoly
Řídicí jednotka předává instrukce regulátoru prostřednictvím různých protokolů, které se neustále vyvíjejí, aby zajistily co nejrychlejší reakce na ovládání koptéry. V dnešní době již všechny regulátory požívají digitální DShot.
DShot
- Nejmodernější, digitální protokol
- Vyšší rozlišení (2048) – přesnější
- Není potřeba kalibrovat ESC
- Podpora dalších funkcí – změna směru motoru, pípání motoru, posílání informace o otáčkách motoru (bidirectional Dshot)
- Méně náchylný na chyby
- Podle rychlosti DShot1200, DShot600, DShot300 a DShot150 (číslo vyjadřuje tisíce bitů za sekundu)
Multishot
- Nejrychlejší analogový protokol
- 10x rychlejší než OneShot125
OneShot42
- 3x rychlejší než OneShot125
OneShot125
- Podporují ho i starší regulátory s BLHeli
PWM
- Klasické řízení regulátoru přes PWM výstup z RC přijímače.