V této kapitole si ukážeme, jak postavit koptéru na rámu Johny 5″ V2. Rám je primárně určený pro freestyle piloty. Poskytuje dostatek prostoru pro komponenty a přitom patří mezi ty menší freestylové rámy. Díky snadné stavbě a nízké ceně je vhodný pro začínající piloty.

Pro stavbu použijeme komponenty:
- Rám: Johnny 5″ V2
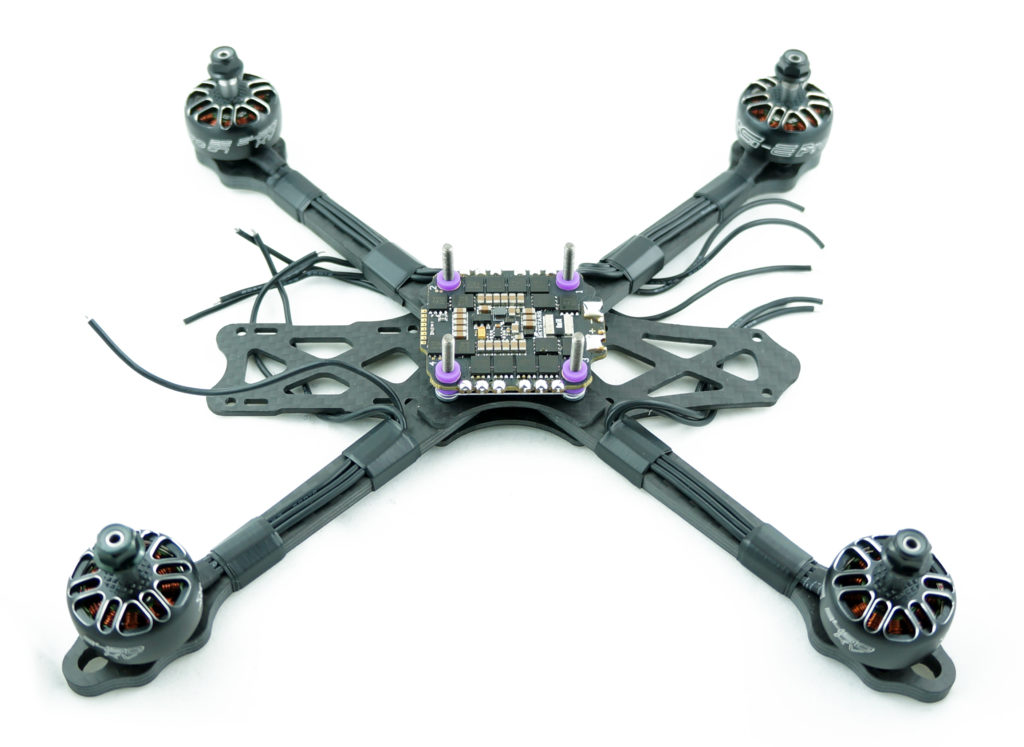
- Motory: iFlight Xing-E Pro 2207 2450Kv
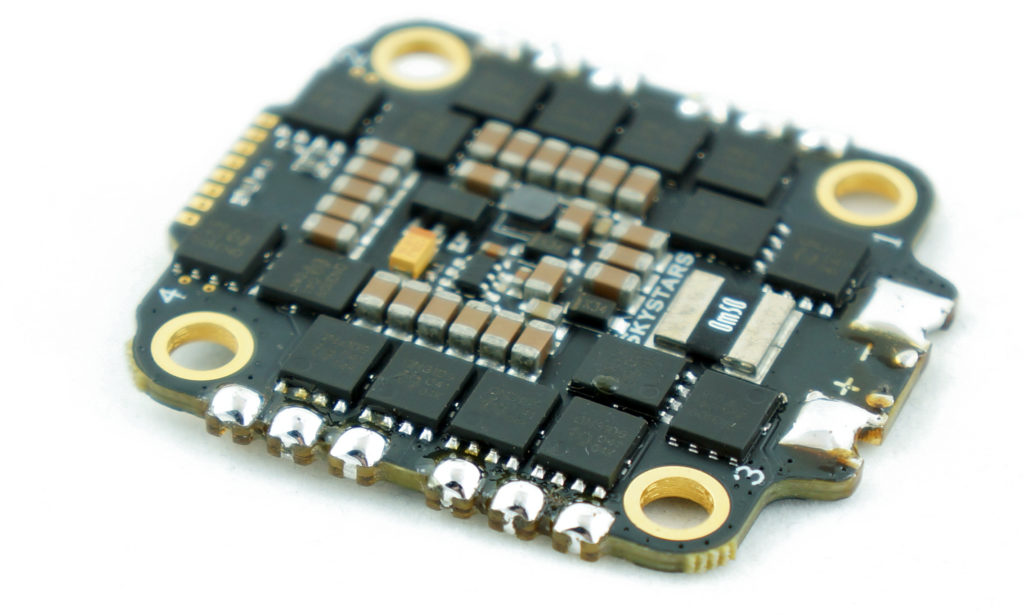
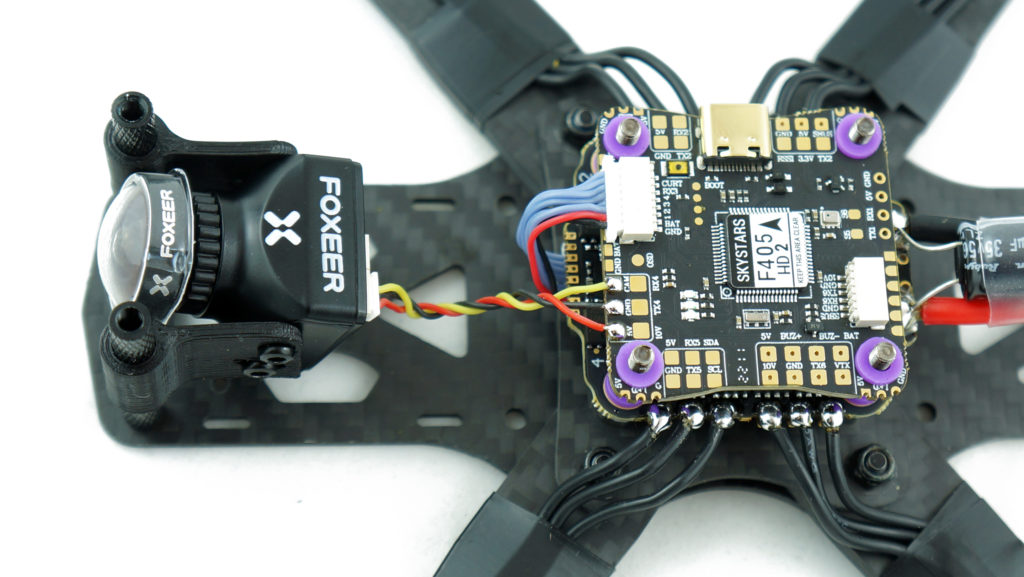
- FC+ESC: Skystars F4 V2+KO45A
- Kamera: Caddx Ratel Mini
- Video vysílač: VivaFPV 25-600mW
- Anténa: MenaceRC Raptor SMA
- Vrtule: HQProp 5×4.3×3
- Lipo pásek: Pogumovaný kevlar 20×250
- Sada drobností pro stavbu
- Držák antény
Ke stavbě dronu budete potřebovat následující vybavení:
- Imbusový šroubovák 2mm a 1.5mm
- Štípací kleště
- Ploché kleště/pinzetu
- Horkovzdušnou pistoli nebo zapalovač
- Páječku
- Cín s tavidlem (ideálně s olovem)
- Izolační pásku nebo textilní izolační pásku
- Oboustrannou lepicí pásku
Na začátku stavby si složíme rám tak, aby držel pohromadě, nerozpadal se a my na něj mohli snadno montovat jednotlivé komponenty. Vezmeme spodní plato a do středových děr dáme nejdelší šrouby, které byly v balení u rámu. Poté na šrouby postupně nasuneme čtyři ramena.
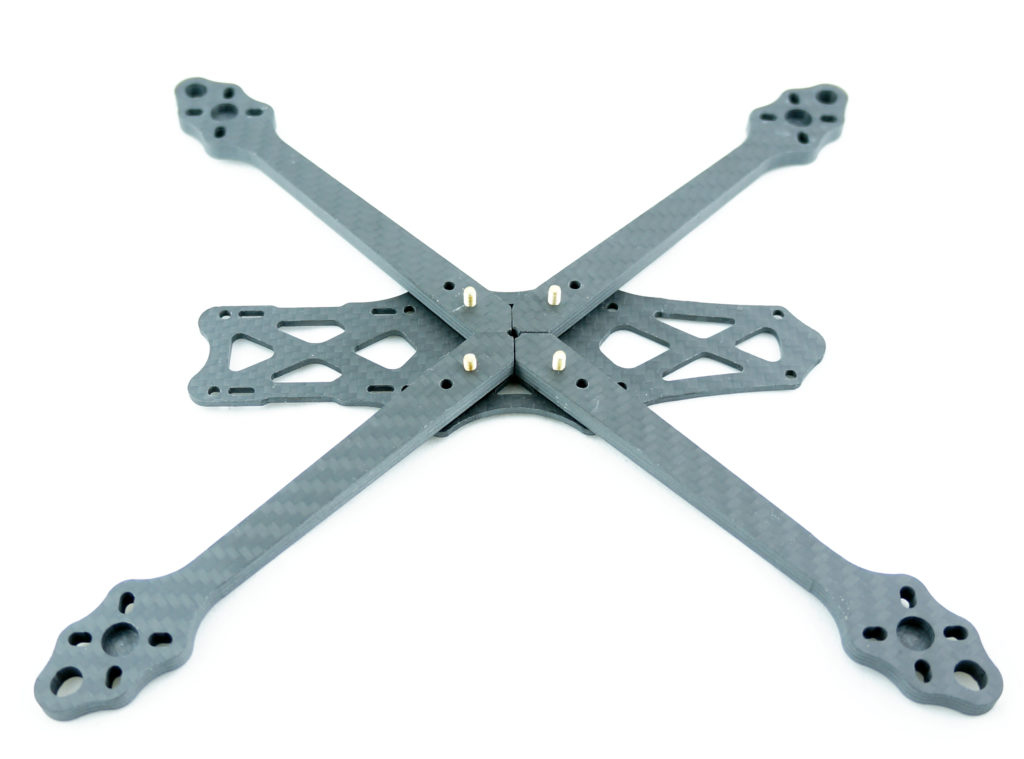
Na šrouby pak nasadíme karbonovou střední desku a postupně našroubujeme 4 matice. Matice nedotahujeme úplně, jen aby rám držel pohromadě.

Do volných vnějších děr dáme dlouhé šrouby, které jsou součástí balení řídicí jednotky a regulátoru. V balení jsou dvě různé délky, použijeme ty delší. Na šrouby zase namontujeme matice. Nyní už všech 8 šroubů pořádně dotáhneme.

Když máme základ postavený, přišroubujeme na rám motory. Při přidělávání motorů je třeba dát si pozor na délku použitých šroubů. Pokud použijeme moc krátký šroub, snadno strhneme závit na motoru. Při použití dlouhého šroubu se můžeme šroubem dostat až do vinutí motoru a motor zničit. Použijeme šrouby, které jsou součástí balení motorů a mají vhodnou délku. Motory přišroubujeme tak, aby kabely směřovaly do středu rámu. Na motory také našroubujeme matky pro uchycení vrtule, abychom je neztratili.

Kabely od motoru srovnáme vedle sebe, a zafixujeme pomocí izolační pásky. Je vhodné kabely fixovat alespoň na dvou místech. Jednou u motoru a podruhé u rámu. Alternativně lze páskou omotat celé rameno a fixovat kabel po celé jeho délce.

Když jsou kabely fixovány, umístíme na středové dlouhé šrouby průhlednou plastovou destičku. Ta pomůže ochránit regulátor a schová hrany šroubů.

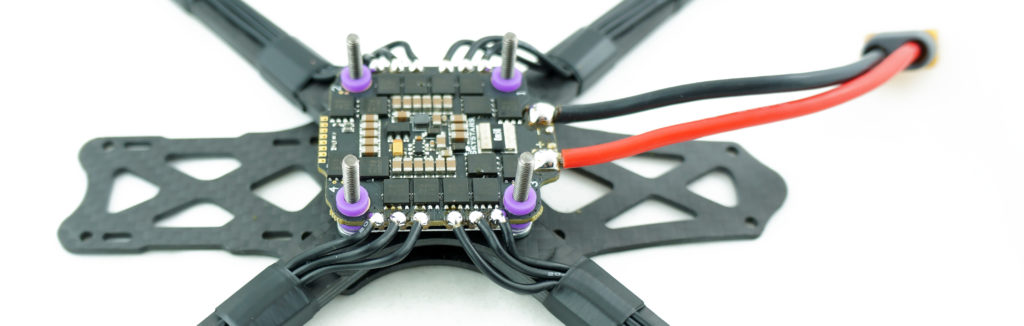
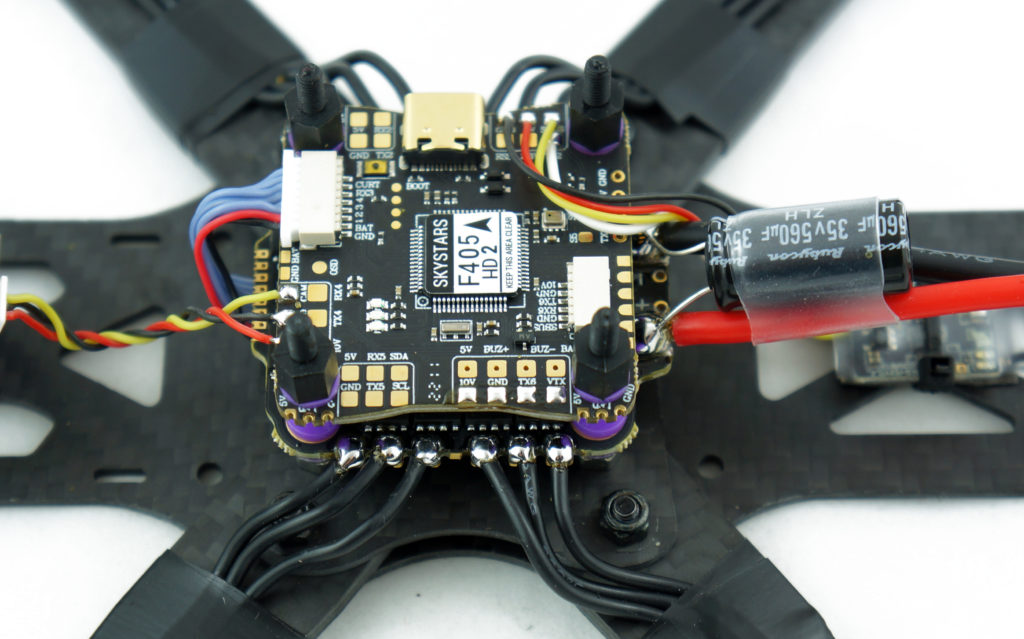
V dalším kroku je potřeba regulátor připravit pro napájení motorů. Je třeba si pocínovat jednotlivé plošky, kam pak budeme pájet kabely od motorů a hlavní přívod, kam napájíme kabely s XT konektorem.
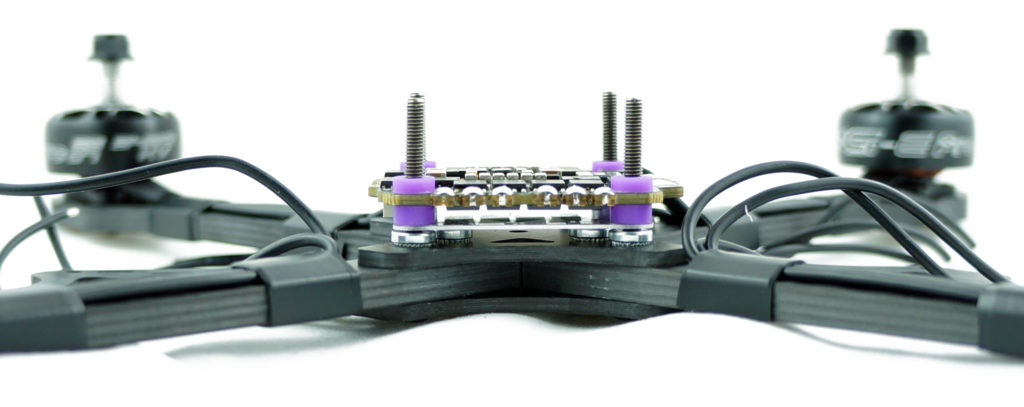
Vnitřní gumičky (softmounty) zpřeházíme tak, aby na řídicí jednotce byly delší a na regulátoru kratší. Izolační gumičky jsou nesymetrické a delší strana musí směrovat dolů.

Regulátor nasuneme na dlouhé šrouby. Místo pro připojení baterie bude směrovat dozadu.
Pohledem z boku se ujistíme, že je mezi regulátorem a šrouby dostatek prostoru a regulátor se nedotýká hlav šroubů.
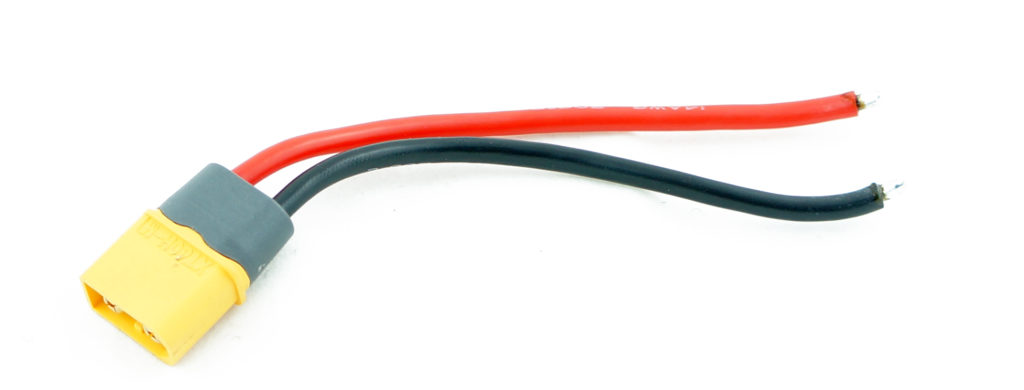
Nyní napájíme kabely s XT60. XT60 si nejprve pořádně pocínujeme, pak pocínujeme kabel a poté spájíme dohromady. Dobrý způsob je rozehřát si cín v konektoru a do rozteklého cínu pak vložit pocínovaný kabel. Dejte si pozor na polaritu konektoru. Červený kabel připájejte na + (placatá část) a černý na – (zaoblená část). Symboly jsou zobrazeny na konektoru.
Před pájením kabelů si také pořádně pocínujeme samotné kabely. Když je kabel i regulátor pocínovaný, přiložíme k sobě a spájíme. Na pájení těchto větších spojů je potřeba mít dostatečně výkonnou páječku a nespěchat. Cínu na regulátoru a na kabelu trvá nějaký čas, než se dostatečně prohřeje a rozteče.

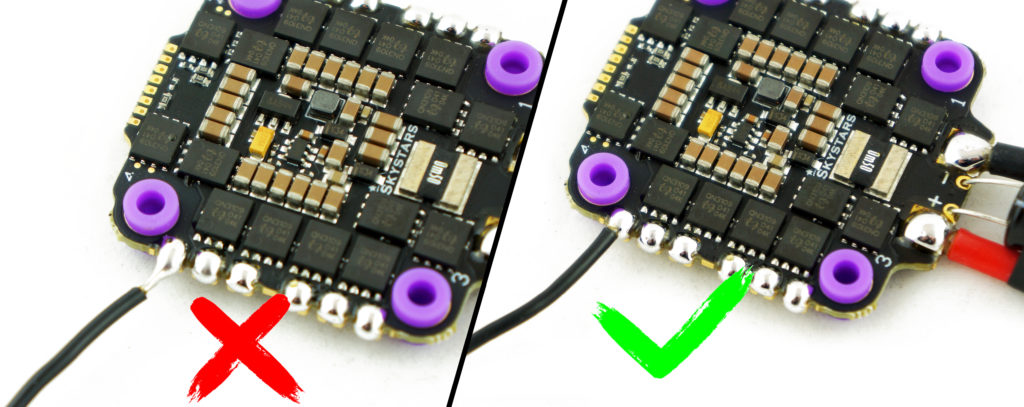
Nyní začneme pájet kabely od motorů. Kabely pájíme vždy po jednom. Kabel si naměříme a zkrátíme. Kabely by neměly být příliš dlouhé, aby se nemohly zamotat do vrtulí. Také by neměly být příliš krátké, aby byly napnuté. Kabel by měl mít vůli a dostatek prostoru k pohybu. Příliš krátký kabel se bude špatně pájet a v případě nárazu a propružení ramene rámu může poškodit regulátor.
Když kabel zkrátíme, oholíme si část kabelu. Silikonovou bužírku lze oholit nehtem, nožem nebo nůžkami. Oholenou část kabelu pořádně pocínujeme. Oholená část by neměla být příliš dlouhá. Stačí 1-2mm, tak aby při připájení kabelu začínala silikonová bužírka hned u spoje. Když máme kabel i pájecí plošku pocínovanou, přiložíme kabel na regulátor a ze shora kabel páječkou připájíme.
Po připájení motorů PEČLIVĚ zkontrolujte regulátor a odstraňte všechny případné KULIČKY CÍNU, které by se na něj mohli během pájení dostat. Kapičky cínu mohou z pájení cákat, pokud máte nekvalitní cín nebo pájíte příliš vysokou teplotou. Kuličky cínu na regulátoru se mohou dostat na nesprávné místo a způsobit shoření celého regulátoru. Kuličky cínu můžete snadno odstranit pinzetou, nehtem nebo kartáčkem. Kuličky tavidla na regulátoru nevadí.
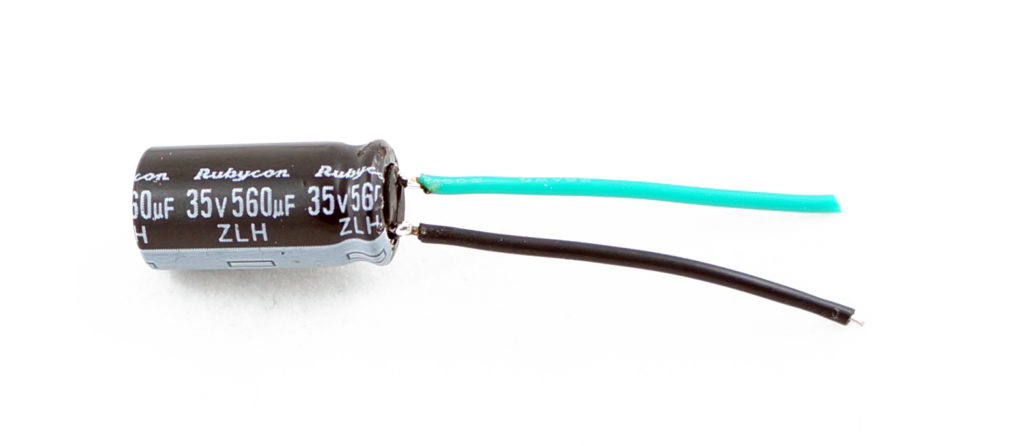
V dalším kroku si připravíme kondenzátor, který je součástí balení regulátoru. Zkrátíme nohy kondenzátoru cca na 1-2mm a pocínujeme je. Na nohy kondenzátoru pak připájíme ohebný kabel v silikonové bužírce, který je součástí sady drobností pro stavbu. Díky ohebnému kabelu se kondenzátor bude moct volně hýbat bez rizika, že se noha kondenzátoru zlomí. Dávejte velký pozor na polaritu kondenzátoru. Pruh na kondenzátoru označuje mínus a musí přijít na místo označené na regulátoru také mínusem.

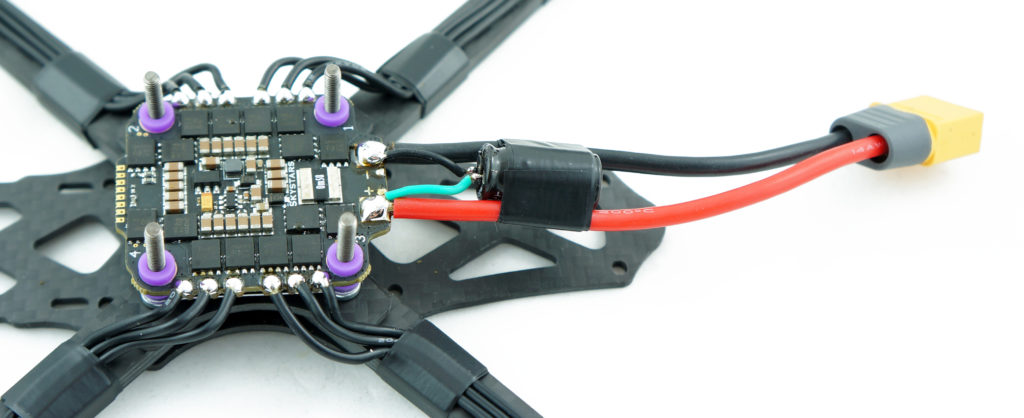
Kondenzátor s kabely přichytíme k hlavním kabelům s XT60 pomocí izolační pásky.
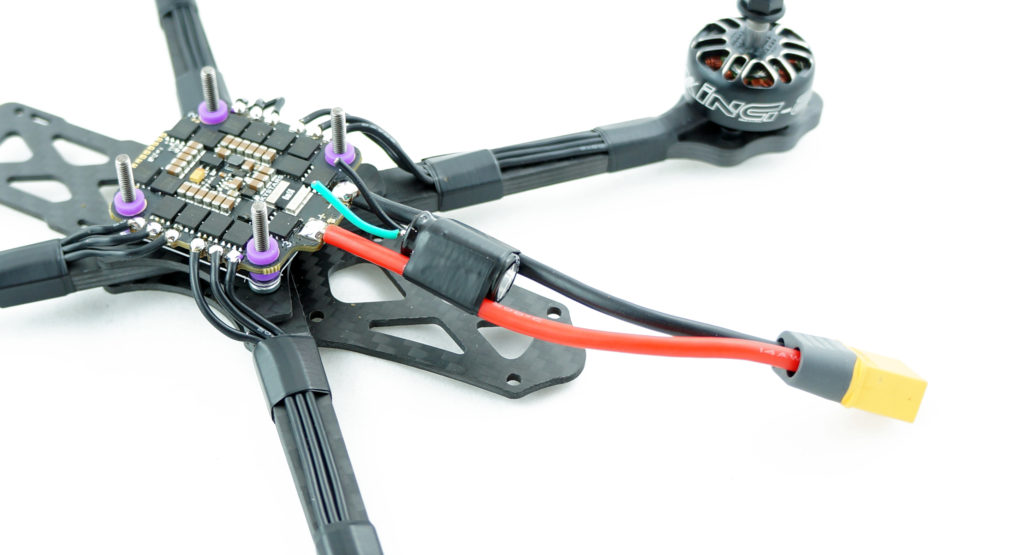
Naměříme si kabely kondenzátoru, zkrátíme, pocínujeme a připájíme na stejné místo jako hlavní kabely s XT60. Kabely od kondenzátoru necháme trochu volnější, aby se kondenzátor mohl hýbat a za kabely netahal.
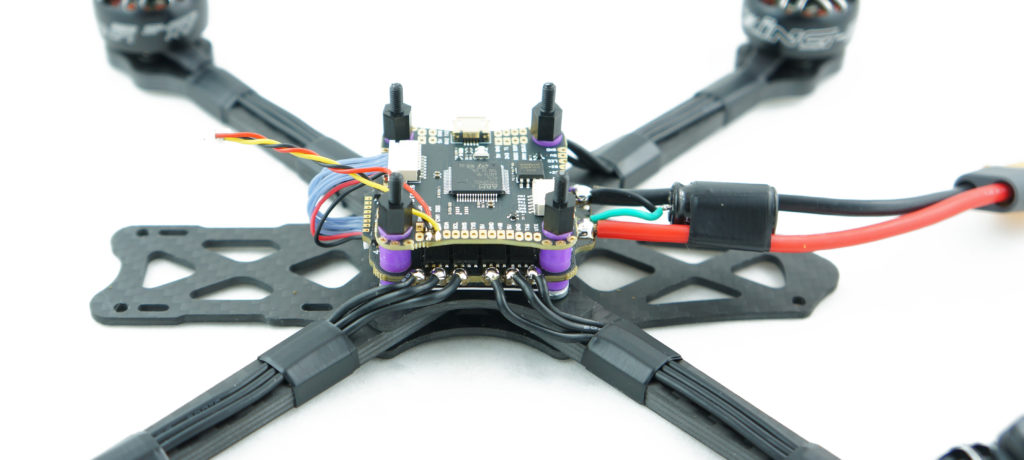
Když je vše připájené, je čas připojit řídicí jednotku. Tu s regulátorem spojíme 8pinovým kabelem. Dbejte zvýšené pozornosti, abyste nezapojili kabel obráceně. Červený a černý kabel musí být pří pohledu zezadu na levé straně, jako na fotkách. Po spojení regulátoru s řídicí jednotkou můžeme řídicí jednotku nasunout na šrouby nad regulátor. Pohledem zboku opět zkontrolujeme, zda-li je mezi deskami dostatek místa a vzájemně se nedotýkají.

Nyní začneme umisťovat na rám ostatní komponenty. Začneme FPV kamerou. Kameru chytneme do karbonových bočnic, které jsou součástí rámu. Na uchycení kamery použijeme kratší šrouby, které jsou součástí balení kamery. Kameru namontujeme tak, aby se dal zvedat její úhel. Kameře nastavíme úhel 15°-25°, který je vhodný pro začínající piloty a freestyle létání.
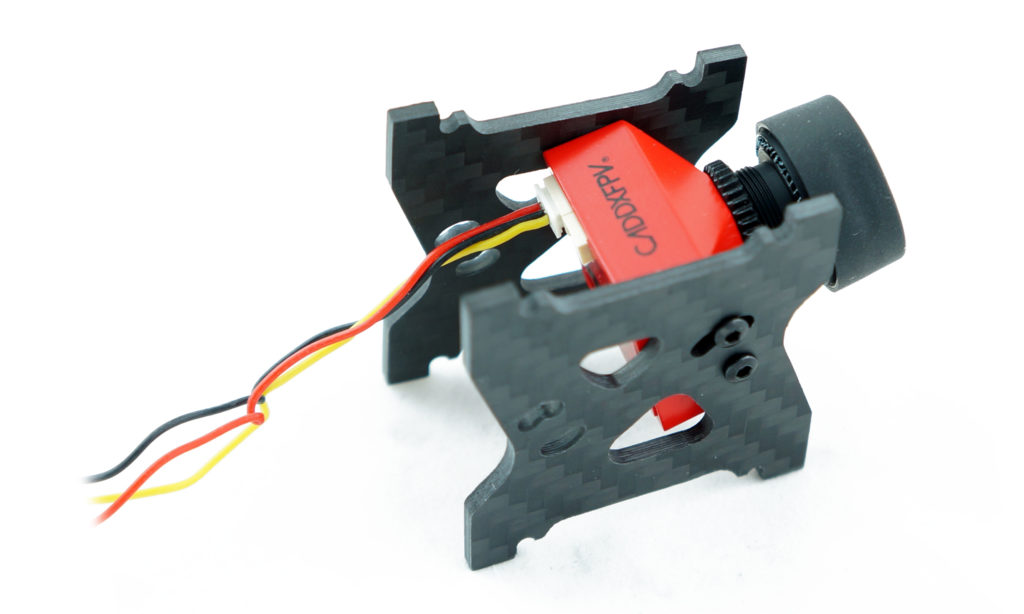
Do kamery zapojíme 3 žilový kabel a bočnice vložíme do rámu. Když je kamera na svém místě, připájíme ji k řídicí jednotce. Pro připojení kamery slouží pady GND, 5V a CAM. GND je zem a spojíme ji s černým kabelem. 5V je napájení pro kameru a spojíme ji s červeným kabelem. CAM je vstup video signálu a spojíme ho se žlutým kabelem.
Plošky na řídicí jednotce si opět pocínujeme. Kabely od kamery naměříme a zkrátíme. Kabely mohou být trochu delší, aby se dal na kameře pohodlně měnit úhel. Když jsou kabely zkrácené, můžeme konektor z kamery odpojit, aby nám kamera nepřekážela a s koptérou se lépe pracovalo. Zkrácené kabely oholíme, pocínujeme a připájíme. Stejně jako u motorů, oholená část kabelu by neměla být příliš velká. Stačí o velikosti padu – tzn. 1-2mm.
Jako další zapojíme RC přijímač. RC přijímač volte vždy dle vašeho rádia. V tomto případě si okrajově ukážeme zapojení přijímače Archer RS. Podle schématu přijímače si připravíme jednotlivé kabely. Černý na zem (GND), červený na napájení, bílý na invertovaný S.Port a žlutý na SBUS výstup. Bílý kabel připojený na invertovaný S.Port slouží pro přenos telemetrie.
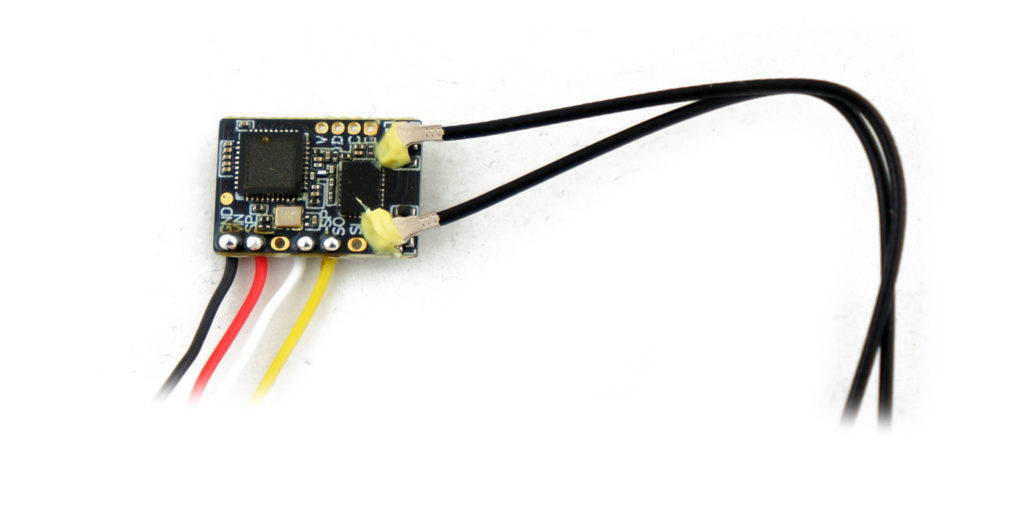
Když jsou kabely zapojené, přijímač schováme do průhledné bužírky. Ta je součástí balení sady drobností pro stavbu. Bužírku lze smrštit buď horkovzdušnou pistolí nebo zapalovačem. Karbonový rám je vodivý a proto je potřeba všechny elektrické komponenty od rámu izolovat.
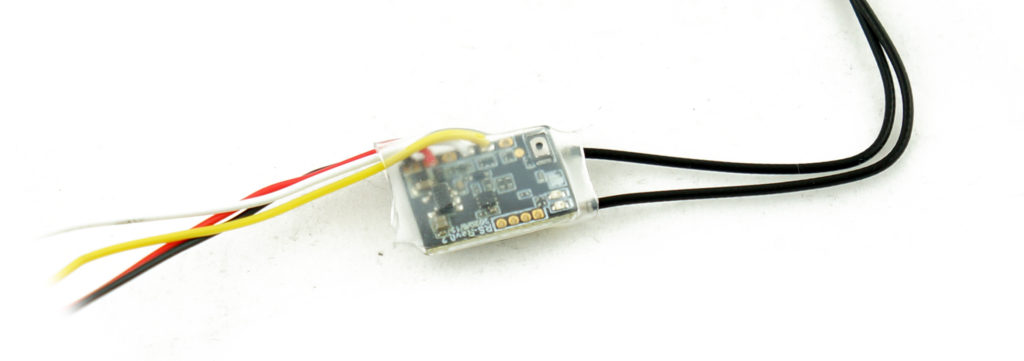
Stejně jako u kamery, naměříme si délku kabelů, oholíme, pocínujeme a připájíme. Černý kabel připájíme na GND, červený na 5V, bílý pro přenos telemetrie na TX2 a žlutý s SBUS výstupem na SBUS, jak je zobrazeno na fotce. Ne všechny přijímače telemetrii podporují a není pro ovládání dronu potřebná. Pokud váš SBUS přijímač telemetrii nepodporuje, zapojíte pouze tři kabely bez bílého. Pokud máte Flysky přijímač s protokolem iBUS, žlutý kabel místo na SBUS připojíte na RX1. U Crossfire přijímače zapojíte žlutý na RX1 a bílý na TX1.
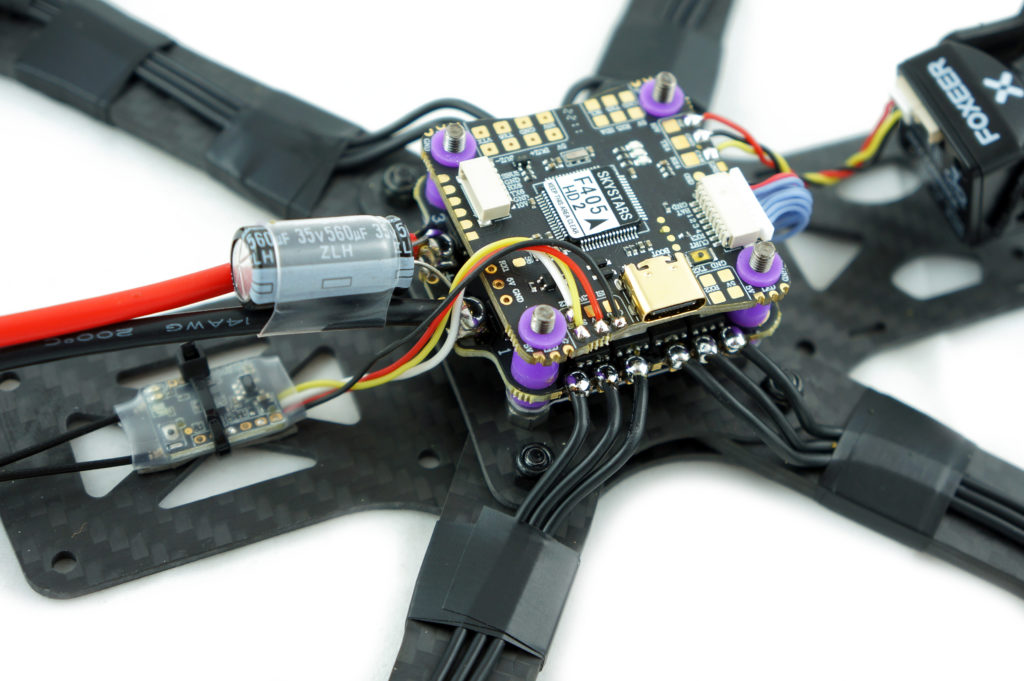
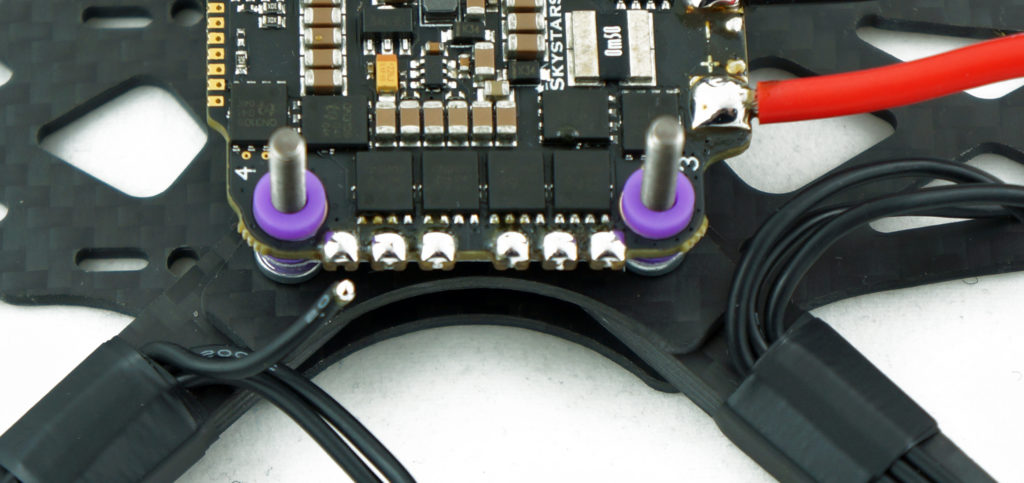
Nyní začneme instalovat video vysílač. Na dlouhé šrouby nad řídicí jednotku našroubujeme nylonové distanční sloupky, které jsou součástí balení rámu.
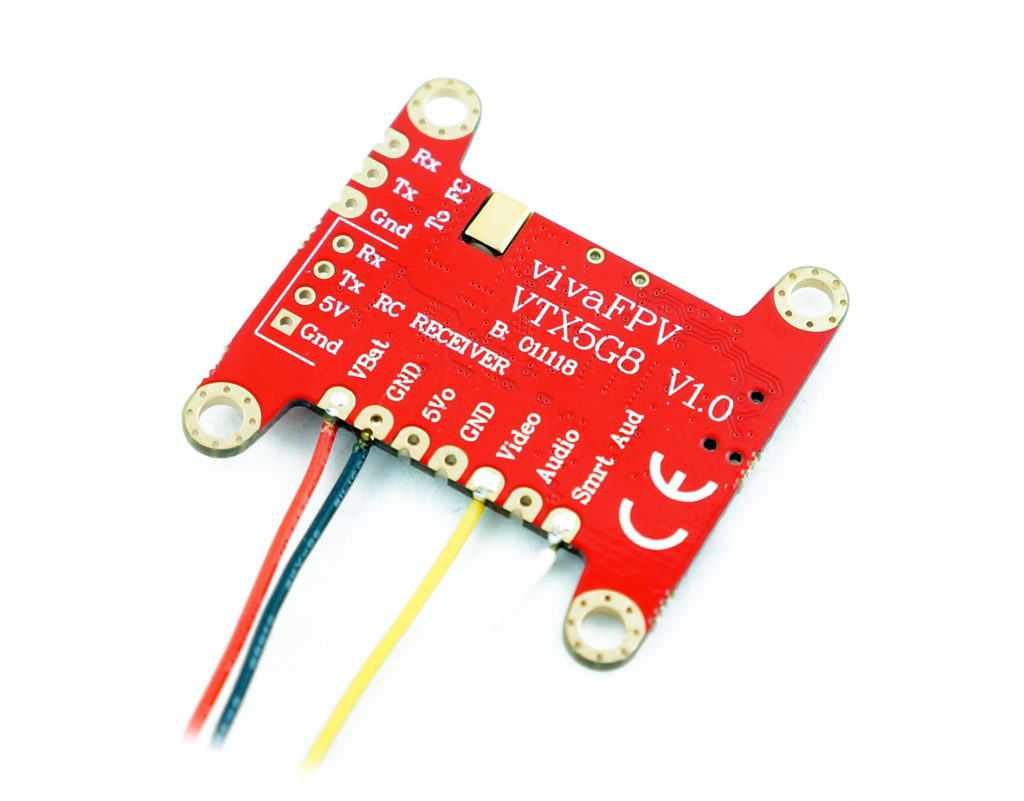
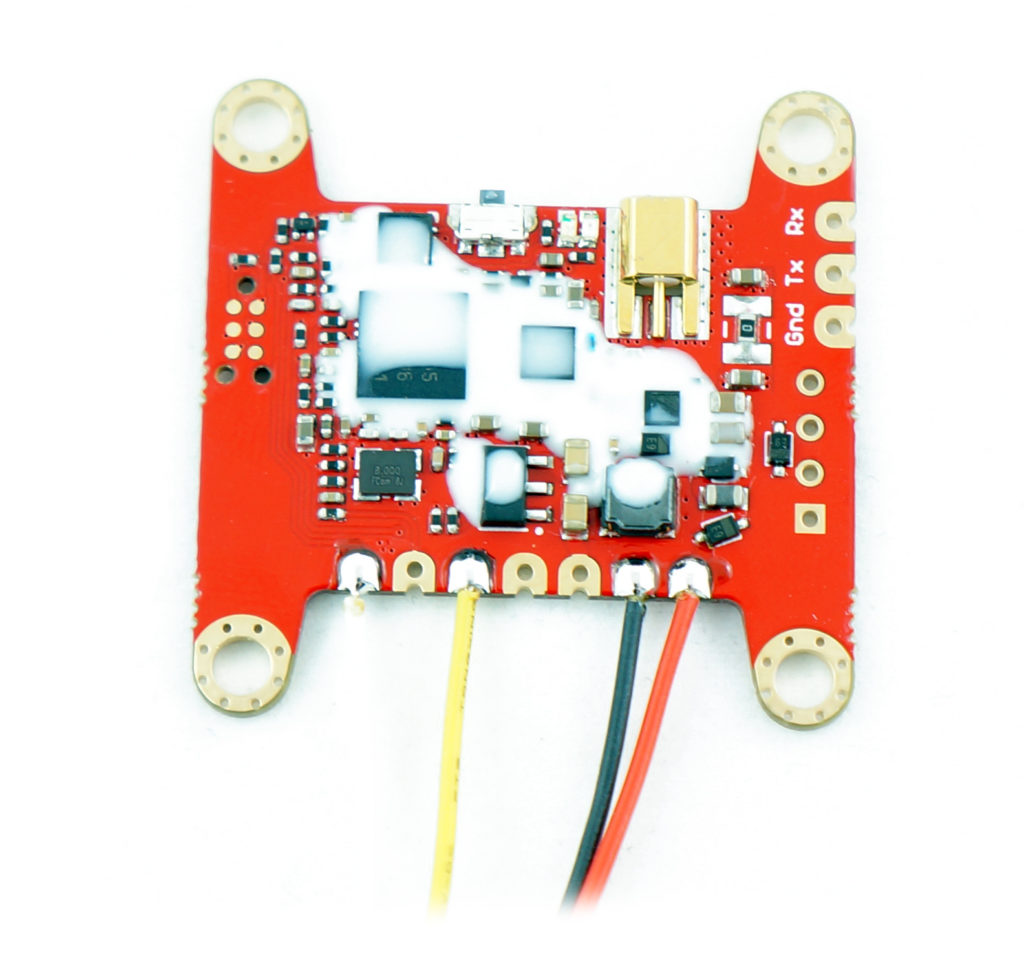
Na video vysílač napájíme kabely. Červený na VBat, černý na GND, žlutý na Video a bílý na Smrt Aud (Smart Audio).
Na řídicí jednotce si pocínujeme piny pro připájení video vysílače. Na pin +VB, což je napětí z baterie, připojíme červený kabel. GND propojíme s černým kabelem. TX6 slouží pro nastavování video vysílače přes řídicí jednotku a připojíme na něj bílý kabel. VTX je video výstup a spojíme ho se žlutým kabelem.

Po napájení kabelu s konektorem zacvakneme do video vysílače pigtail a nandáme ho na distanční sloupky video vysílač. Video vysílač umístíme součástkami dolů k řídicí jednotce, výstupem pro anténu doprava. Video vysílač můžeme jednou nebo dvakrát otočit, aby se kabely mezi video vysílačem a řídicí jednotkou smotaly dohromady.
Pigtail protáhneme pod video vysílačem. Platovými matičkami video vysílač zajistíme. Vezmeme štípací kleště a uštípneme přečuhující závity distančních sloupků, které koukají přes plastové matky.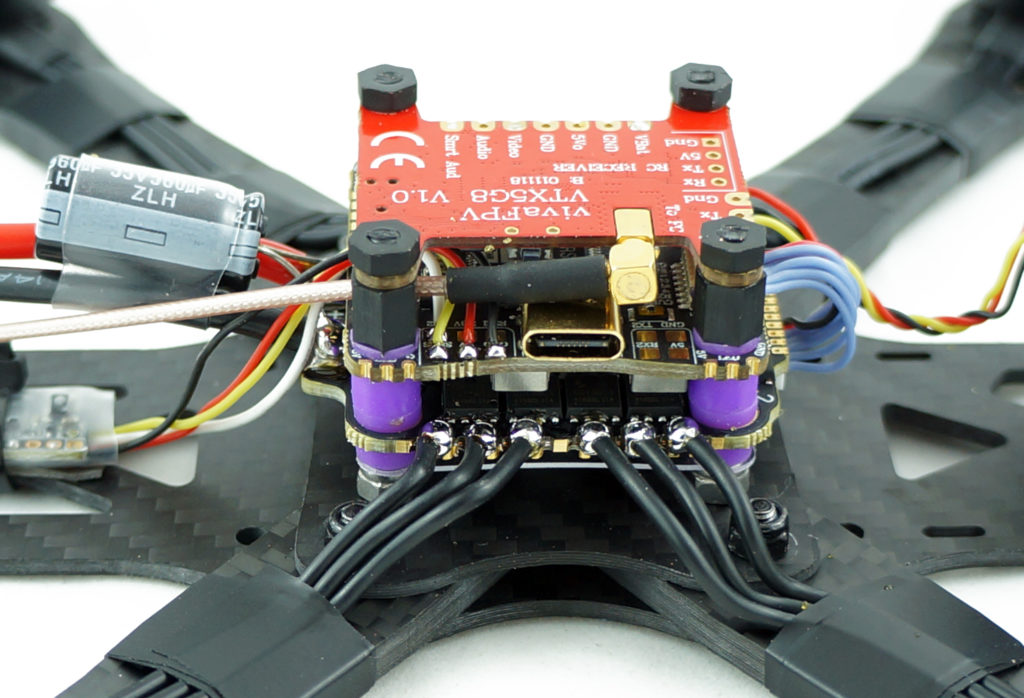
Nyní si připravíme pigtail pro anténu. SMA konektor vložíme do 3D tištěného držáku. Na SMA konektor dáme podložku a pevně utáhneme matkou. Na rám pak můžeme nasadit distanční sloupky. Ty chytneme krátkými šrouby, které jsou v balení u rámu.
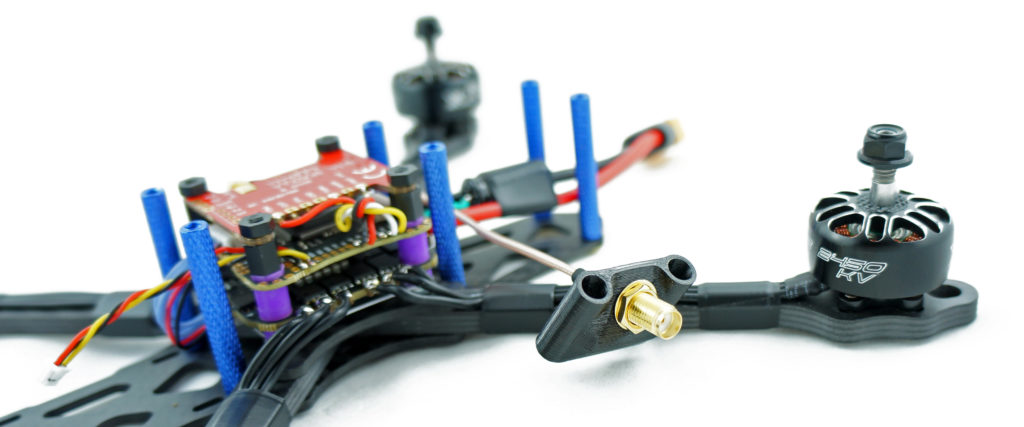
Na zadní sloupky nasadíme 3D tisk s pigtailem tak, aby SMA konektor směroval šikmo vzhůru od koptéry. Při nasazování 3D tištěných dílů na sloupky je potřeba použít sílu. 3D tisk je dobré nasazovat zespodu, aby zůstal dole. Kabel s XT60 konektorem pak půjde nad anténou.

Po nasazení 3D tisku můžeme zapojit konektor do kamery a nasadit bočnice do připravených výřezů.

Všechny díly (kromě přijímače) jsou nainstalované a uchycené a nyní můžeme nandat horní plato a koptéru zavřít. Horní plato chytneme na 8 místech krátkými šrouby do distančních sloupků. Silové kabely protáhneme nad SMA konektorem pro anténu. Na horní plato nalepíme pěnovou podložku, která zvyšuje tření mezi baterií a rámem a chrání baterii před vyčuhujícími šrouby.
Na SMA konektor našroubujte FPV anténu, protáhněte lipo pásek mezi horním platem a video vysílačem a koptéra je postavená. Nyní zbývá ji nastavit v betaflightu.

Před letem je vždy potřeba si zkontrolovat, že se vrtule mohou volně točit a nic se do nich během letu nemůže přimotat. Velmi často se stává, že se do vrtulí dostane kabel o baterie a vrtule ho posekají. Kabel s XT60 chytněte i s baterií pod lipo pásek. Zůstane tak pevně na svém místě.

Koptéru budeme nastavovat přes program Betaflight Configurator. Ujistěte se, že máte staženou nejnovější verzi. Pokud budete mít připojenou koptéru k počítači a zároveň budete zapojovat baterii, vždy z koptéry sundejte vrtule. Tento návod je pro právě složenou koptéru. Pokud chcete obecnější a podrobnější návod, najdete ho zde.
Než začneme s nastavováním, nahrajeme do řídicí jednotky nejnovější firmware. Připojte řídicí jednotku k počítači pomocí USB kabelu. V pravém horním rohu by se měl zobrazit nový COM port (v našem případě COM3). Klikněte na Update Firmware. V okně s výběrem firmware si zvolte target (desku) SKYSTARSF405 a nejnovější verzi Betaflightu (v době psaní článku 4.2.11). Z voleb níže vyberte možnost Full chip erase. Po vybrání desky a firmwaru v pravém dolním rohu klikněte na tlačítko Load Firmware [Online] a potom Flash Firmware. Místo COM portu se objeví nápis DFU a firmware by se měl do desky automaticky začít nahrávat.

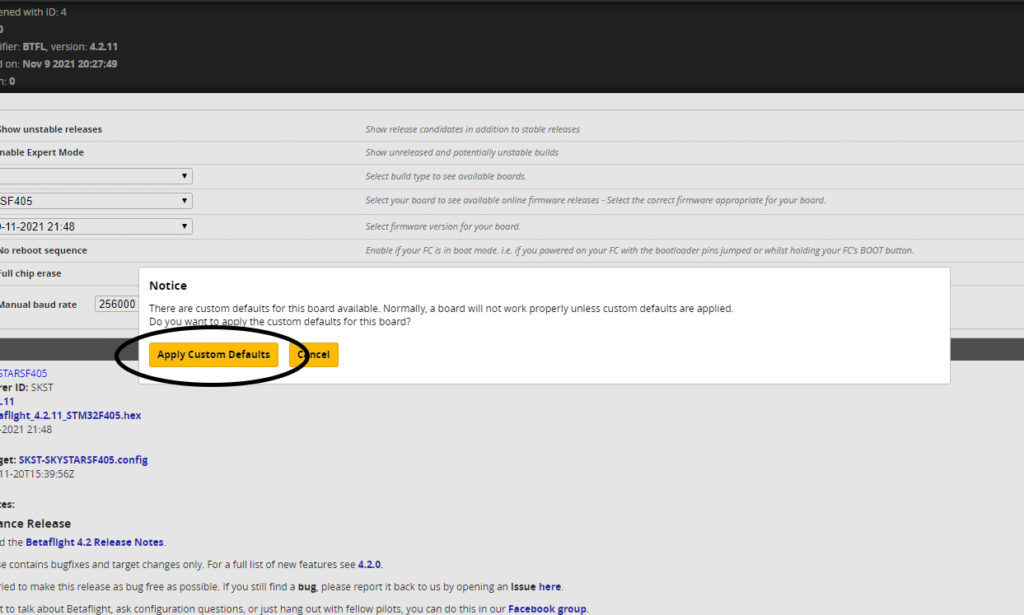
Po nahrání nové verze firmware vybereme COM port desky a vybereme možnost Connect. Při prvním připojení desky po nahrání nového firmware se zobrazí Notice jako na obrázku. Klikneme na tlačítko Apply Custom Defaults.
Deska se pak znovu odpojí a připojí a je připravena k nastavení. Po připojení se zobrazí první záložka Setup. Koptéru položíme na rovný povrch a klikneme na tlačítko Calibrate Accelerometer. Model koptéry zobrazený pod tlačítky by se měl naklánět stejným způsobem jako skutečná koptéra.
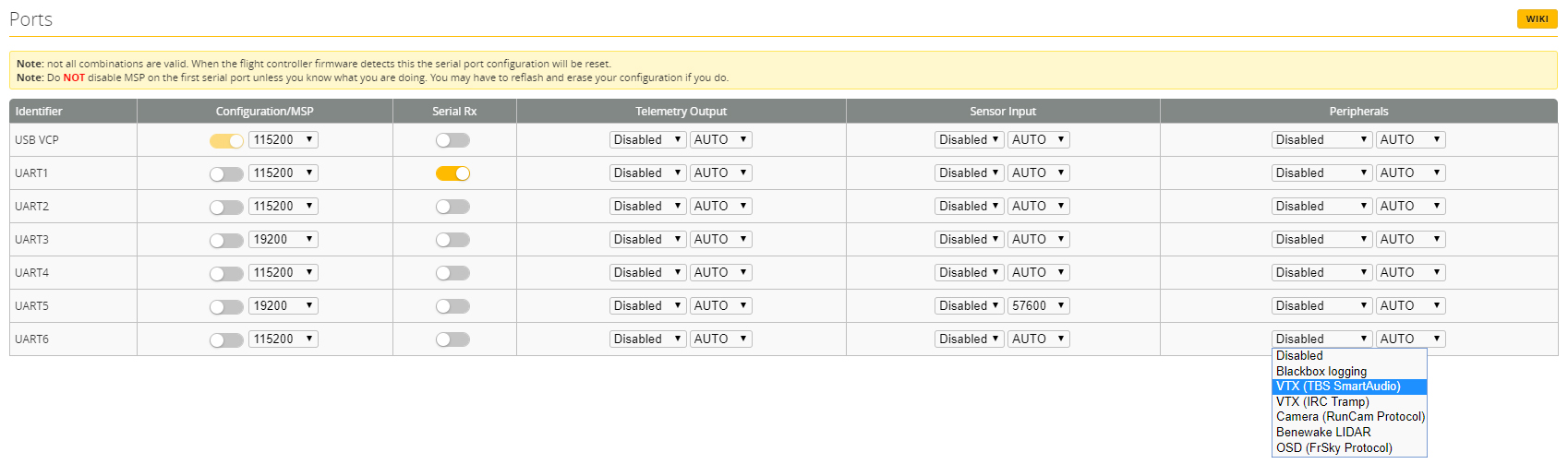
Po kalibraci akcelerometru se přepneme na záložku Ports. Porty nastavíme dle obrázku níže. U UART1 zaškrtneme Serial RX. Protože jsme použili Frsky přijímač podporující telemetrii, u UART2 vybereme SmartPort. U UART6 vybereme VTX (TBS SmartAudio), což je protokol, přes který se nastavuje video vysílač.
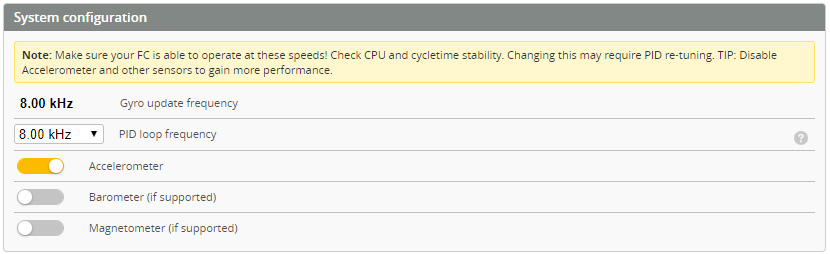
Záložku Configuration nastavíme podle obrázků. V System configuration vypneme Barometer a Magnetometer, které deska nemá. Frekvenci PID loop nastavíme na 8kHz. U nových desek s gyrem BMI270 lze nastavit pouze 3.2kHz.
V Receiver vybereme možnosti Serial-based receiver a protokol SBUS. Protokol vždy vybíráme dle použitého přijímače (Flysky iBUS, Crossfire CRSF).

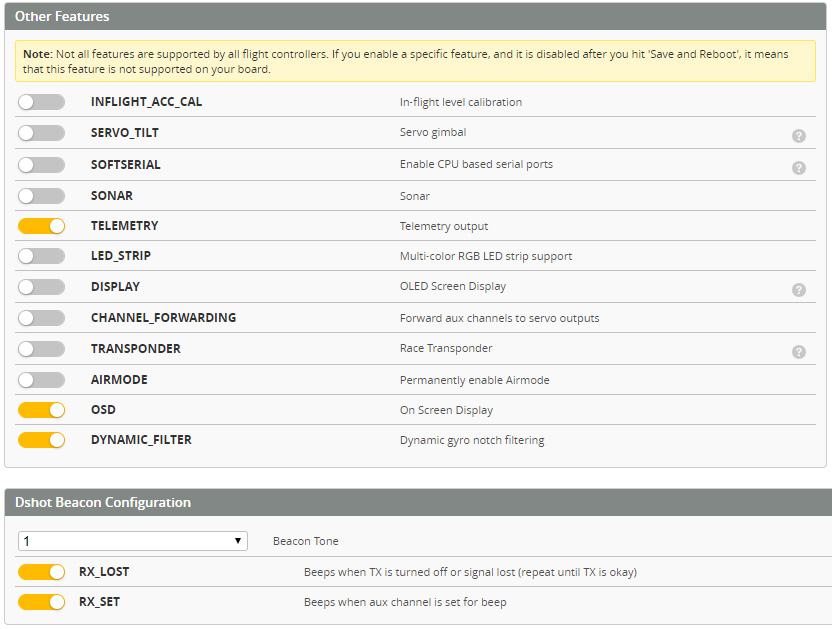
V Other Features vybereme možnosti TELEMETRY (protože použitý přijímač telemetrii podporuje), OSD a DYNAMIC_FILTER. Ostatní možnosti vypneme. V Dshot Beacon Configuration vybereme možnosti RX_LOST i RX_SET.
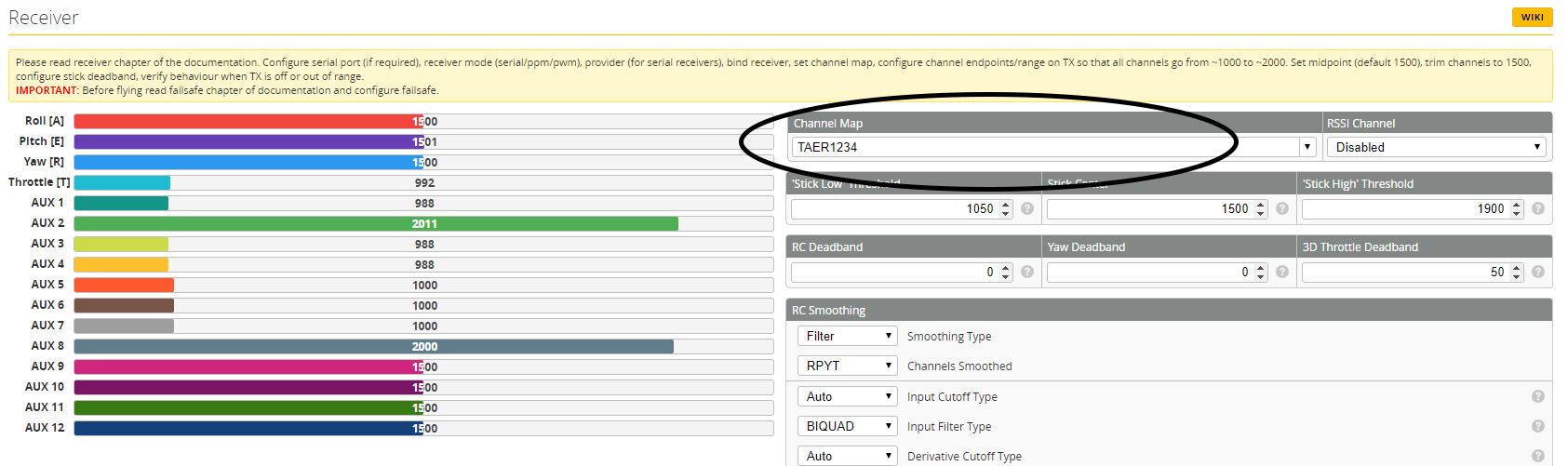
V záložce Receiver si ověříme správné nastavení RC přijímače. Levé grafy zobrazují aktuální hodnotu kanálů a měly by reagovat na pohyb kniplů na vysílačce. Ujistěte se, že je přijímač napájený (svítí). U některých řídicích jednotek je potřeba pro napájení přijímače zapojit baterii. Pokud se kanály hýbou, nicméně nejsou ve správném pořadí (například plyn ovládá Pitch místo Throttle), je potřeba upravit mapování kanálů. To se dělá v okně Channel Map v pravé části. Správné přirazení kanálů si také můžete ověřit na modelu koptéry v pravém dolním rohu.
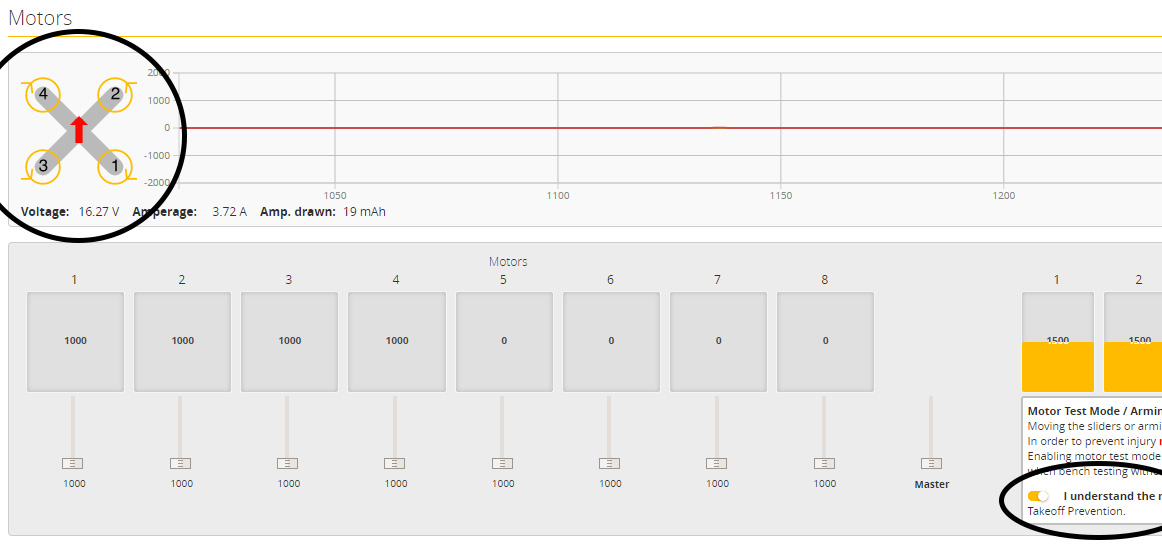
V záložce Motors vyzkoušíme pořadí a rotaci motorů. Pro roztáčení motorů je potřeba zapojit baterii. Test motorů dělejte vždy bez vrtulí. Nejprve v pravém dolním rohu zaškrtněte potvrzení, že máte sundané vrtule. Jednotlivými táhly pak roztáčíte příslušné motory. Motor stačí roztáčet trochu, není dobré motor bez vrtule roztáčet do maximálních otáček. Motory by se měli točit v pořadí a ve směru, který je uvedený na diagramu v levém horním rohu. Pokud jste postupovali podle návodu, pořadí motorů by mělo být správné. Jak se mění rotace motorů si ukážeme později v nastavení regulátorů přes BlHeli Suite.
V záložce OSD nastavíme telemetrické informace, které budou vidět v obraze. Jednotlivé elementy lze zobrazit zaškrtnutím checkboxu. Pozici v obraze měníte myší přetažením. V OSD si zobrazíme elementy Battery voltage (přesuneme do pravého dolního rohu), Timer2 (přesuneme do levého dolního rohu) a Warnings (necháme kde jsou).
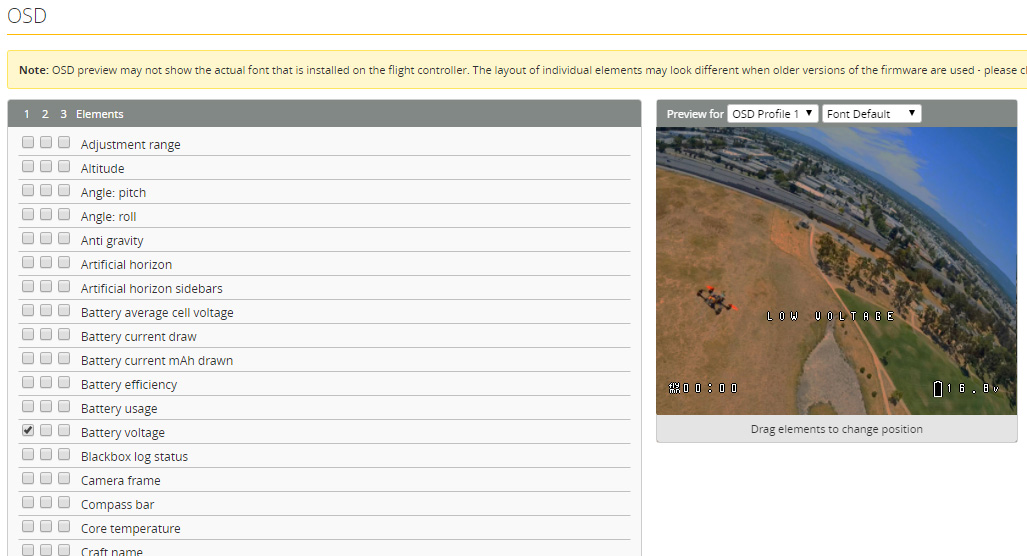
Elementy v OSD uložíme tlačítkem Save v pravém dolním rohu. Pro lepší viditelnost OSD je dobré si upravit font. To uděláme. Kliknutím na tlačítko Font Manager.
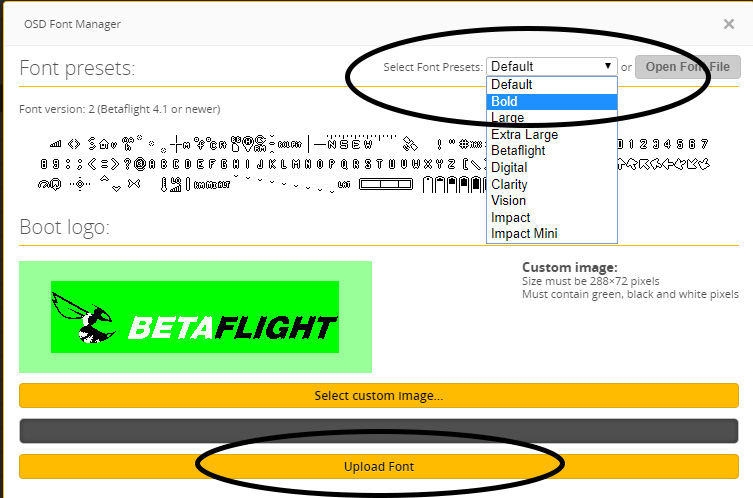
Z nabídku fontů si vybereme možnost Bold a klikneme na tlačítko Upload Font.
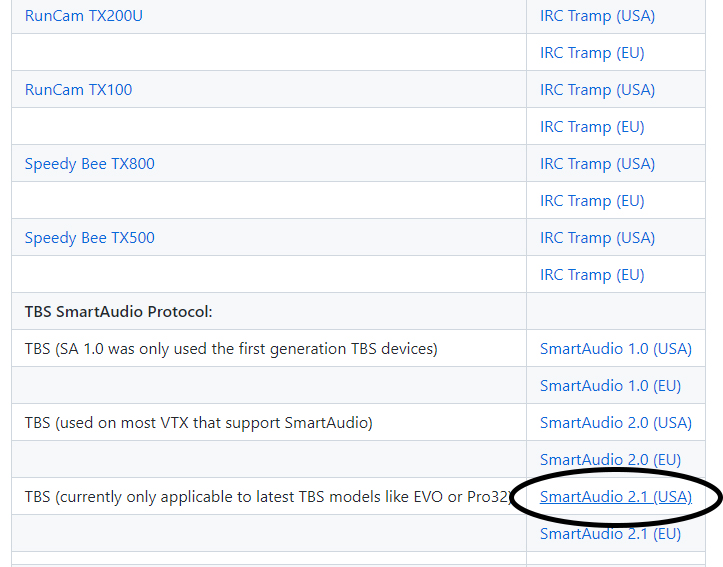
V záložce Video Transmitter nastavíme náš video vysílač. Přes odkaz v konfigurátoru se dostaneme na stránku, odkud si stáhneme konfigurační soubor.
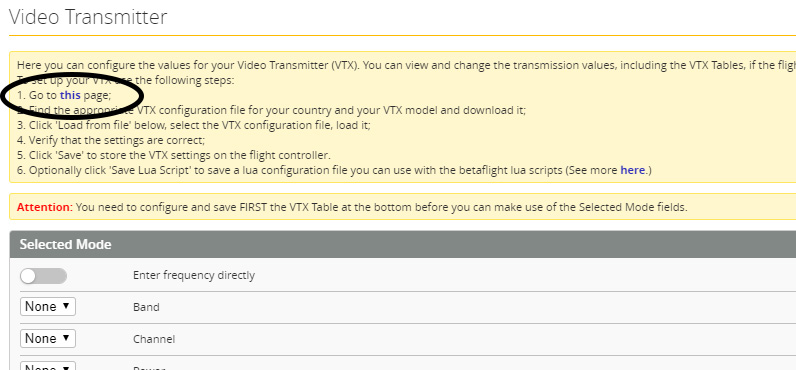
Pro video vysílač VivaFPV 25-600mW s protokolem TBS SmartAudio 2.1 si stáhneme soubor SmartAudio 2.1 (USA). USA verze má oproti té EU dostupných více kanálů a výkonů.
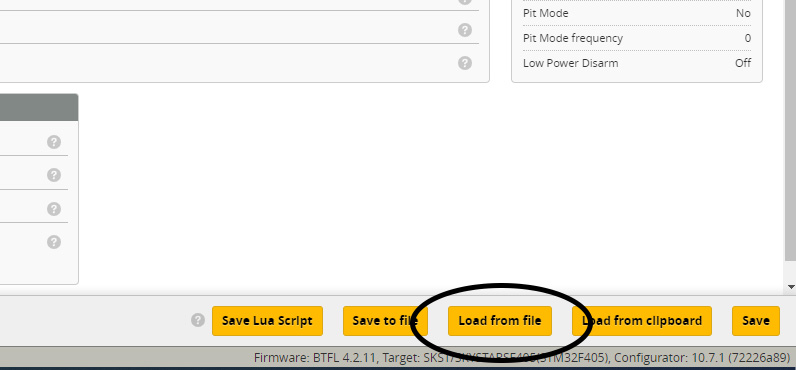
V konfigurátoru v pravém dolním rohu klikneme na tlačítko Load from file a vybereme stažený soubor.
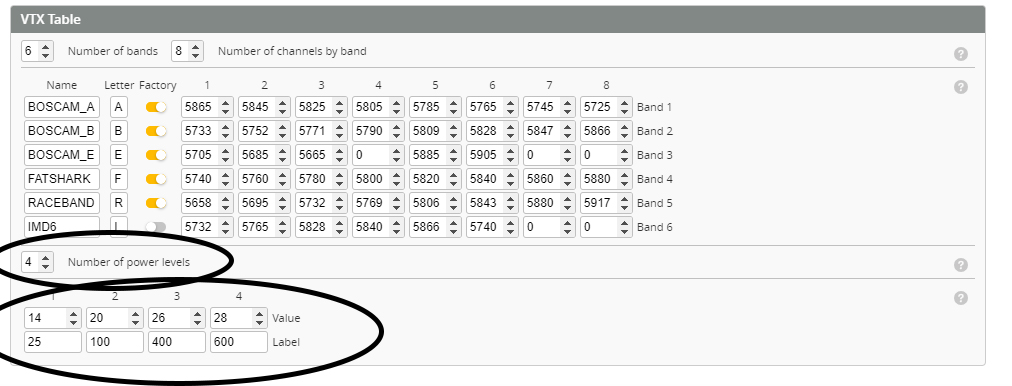
Po vybrání souboru se nám automaticky vyplní tabulka s pásmy, kanály a frekvencemi. VivaFPV 25-600mW podporuje výkony pouze 25/100/400/600mW, je tedy potřeba příslušně upravit tabulku výkonů. Vybereme tedy pouze 4 úrovně výkonu vedle Number of power levels a výkony upravíme dle obrázku. Nastavení je pak potřeba uložit tlačítkem Save.
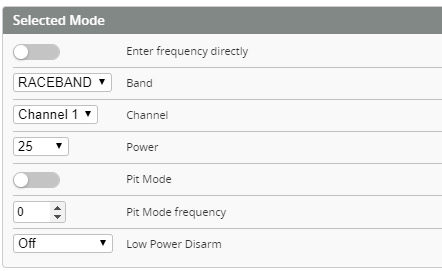
V Select Mode je pak možné nastavit video vysílač. Pásmo vyberete v Band, kanál v Channel a výkon v Power. Pit Mode nechte vypnutý. Pro úspěšný přenos obrazu musíte mít nastavený stejný kanál a pásmo jak na video vysílači, tak na FPV brýlích. Které konkrétně to budou není důležité, jen musí být stejné.
V záložce Modes přiřadíme funkce jednotlivým kanálům vysílače. Funkce přiřazujte kanálům dle toho jak jste zvyklí, a jak máte nastavené přepínače na vaší vysílačce. Zde si ukážeme obvyklé nastavení, které bývá zvykem (ne však pravidlem). Kanál AUX1 použijeme pro ARM koptéry. Druhý AUX kanál použijeme k výběru letových režimů. Často se používá třípolohový spínač a režimy ANGLE, HORIZON a ACRO. Akrobatický mód v seznamu nenajdete. Je to výchozí mód, který je aktivní, pokud není vybraný žádný jiný. V kombinaci s akrobatickým módem je dobré zapínat funkci AIR MODE. Na další kanál AUX3 nastavíme funkcí BEEPER, která během aktivity spustí pípání pípáku nebo motorů. AUX4 lze případně použít na funkci FLIP OVER AFTER CRASH.



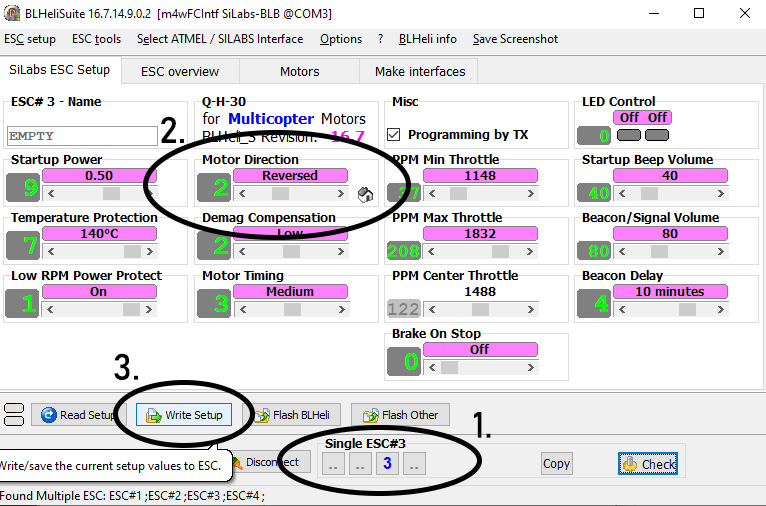
Nastavením módu základní konfigurace v Betaflightu končí. Pokud se při testu motorů ukázalo, že se točí na druhou stranu, je třeba jejich rotaci změnit v nastavení regulátorů. To se provádí přes program BlHeli Suite, který lze stáhnout zde.
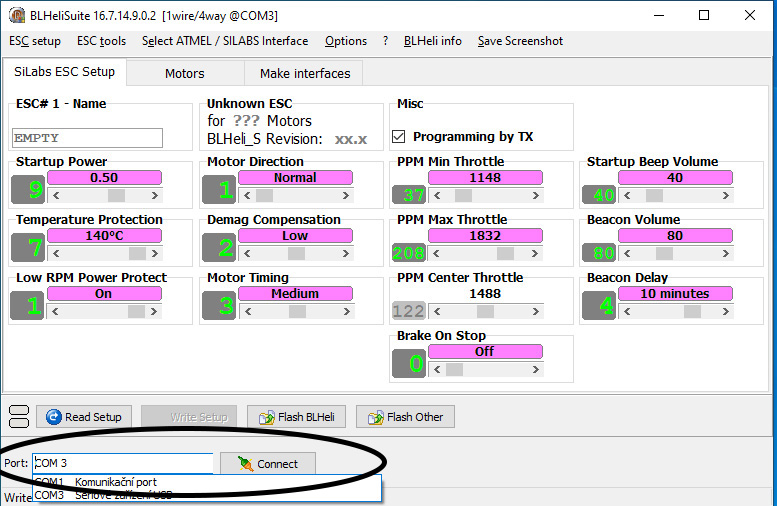
Před připojením nejprve vypneme Betaflight konfigurátor a zapojíme baterii. V levé dolní části vybereme správný COM port a klikneme na Connect.
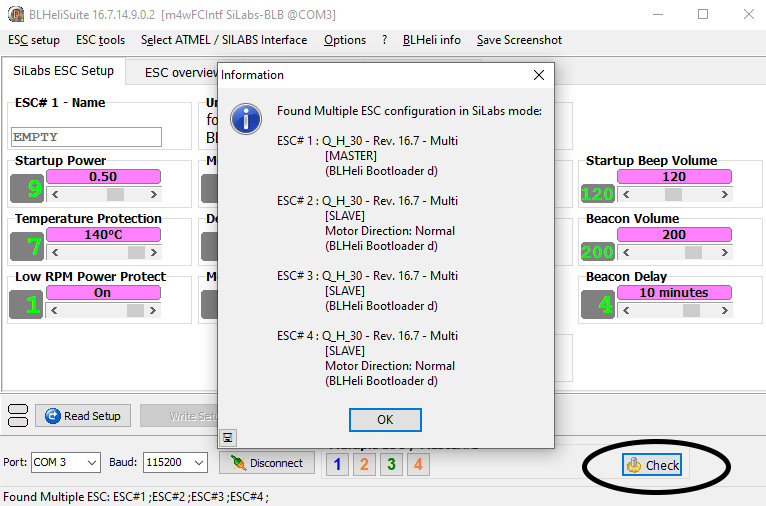
Po připojení klikneme v pravém rohu na Check. Tím se zkontrolují regulátory, které jsou připojené k řídicí jednotce.
Pro otočení směru otáčení motoru je třeba si vybrat číslo motoru, kterému chceme změnit směr rotace. To uděláme pravým kliknutím myši. V nastavení Motor Direction vybereme možnost Reversed. Poté klikneme na tlačítko Write Setup. Toto opakujeme pro všechny motory, u kterých je třeba změnit směr otáčení.